基于RF-RFECV的海洋溢油极化SAR特征优选
王淑祯, 宋冬梅*
(中国石油大学 (华东) 海洋与空间信息学院, 青岛 266580)
摘要: 海洋溢油给生态系统和环境带来了严重的损害, 及时准确地探测海洋表面的溢油对维护海洋生态平衡和保护环境具有至关重要的意义。目前, 在溢油检测方面, 溢油特征选择方法人为主观性强、特征利用效率低、较少涉及多种不同特征组合的应用。为此, 提出一种基于 RF-RFECV海洋溢油特征智能优选策略。通过系统提取Radarsat-2影像的极化特征与纹理特征, 构建多维特征空间。算法自主计算各个特征在溢油、疑似溢油及海水类别中的区分度权重, 最终为Radarsat-2数据筛选出16/18维最优特征组合。实验结果表明, 利用优选后的 特征进行溢油检测, 有效提升了溢油检测的精度, 降低了误检和漏检的情况, 充分证明了算法的有效性。
关键词: RF-RFECV, 海洋溢油, 特征优选, 极化SAR
DOI: 10.48014/ais.20250310001
引用格式: 王淑祯, 宋冬梅. 基于RF-RFECV的海洋溢油极化SAR特征优选[J]. 交叉科学学报, 2025, 2(1): 10-21.
文章类型: 研究性论文
收稿日期: 2025-03-10
接收日期: 2025-03-19
出版日期: 2025-03-28
1 引言
海洋在调节气候、支持生物多样性、提供资源和促进全球经济中发挥着至关重要的作用,是地球生态系统和人类可持续发展的基础。随着海洋资源开发和利用的不断推进,海上活动日益频繁,随之而来的船舶数量和运力不断增长,溢油事故的发生率也显著增加。在溢油检测研究的初期,主要采用单极化SAR数据进行检测。研究首先提取影像的纹理、几何等特征,随后将这些特征进行组合,通过机器学习算法或者基础神经网络模型等方法进行溢油检测。魏铼等[1]利用3景渤海地区的ERS-2 SAR影像,提取了纹理特征用于溢油检测。在提取特征后,详细分析了每种纹理特征及其相关参数对溢油分类精度的影响,最终确定出最优的四个纹理特征,并将其与影像的传统信息相结合,取得了较好的分类效果。Lang等[2]基于墨西哥湾地区的2景ENVISAT SAR影像,利用几何、纹理、灰度特征相关特征进行溢油检测,实验取得了较为理想的溢油检测效果。马龙等[3]基于西班牙海岸附近“威望号”溢油事故,对影像提取纹理特征进行分析,然后利用SVM进行分类,实验表明结合纹理特征的SVM具有较好的分类效果。但是,单极化SAR影像的极化方式单一,无法提供全面的地物散射信息,有一定的局限性,且易受到背景噪声的干扰等缺点,对于溢油和其他疑似溢油的区分能力不足。相较于单极化SAR系统提供的有限信息,多极化SAR系统可以提供更多的地物目标散射信息来实现高精度的溢油检测。为此,众多学者展开了深入而系统的研究。Zhang等[4]提出了一种基于一致性系数的分类方法,实验利用C波段的RADARSAT-2 SAR 图像来进行验证,实验证明此方法能够有效地检测溢油。Minchew等[5]针对2010年6月23日发生于墨西哥湾的溢油事件展开研究,通过对SAR影像进行相干矩阵的分解,提取并分析了相关特征,研究结果表明,极化散射角、极化熵以及反射熵在油膜检测中表现出显著优势。尽管这些特征在溢油检测中表现出良好的效果,但检测过程较少涉及多种不同特征组合的应用,缺乏对不同特征在溢油检测中的优劣对比分析。因此,在海洋溢油检测领域,还需进一步研究多种特征相结合的溢油检测方法,进一步提升溢油检测的准确性。
2 数据与方法
2.1 Radarsat-2全极化数据
Radarsat-2是加拿大航天局(CSA)与MDA公司合作开发的全球首颗商用合成孔径雷达(SAR)卫星,于2007年发射。它能够提供高分辨率、多极化、多模式的雷达图像,广泛应用于海洋监测、陆地资源管理、灾害评估等领域。卫星的轨道高度为798km,其重访周期为24天。为了增强数据的连续性,Radarsat-2在继承Radarsat-1的工作模式的基础上,还新增加了多极化成像等观测模式。此外,Radarsat-2还支持左视和右视切换,显著缩短重访周期。
其中,两景影像均为墨西哥湾发生溢油事故时获取的全极化SAR溢油影像,如图1所示。其获取时间分别为2015年6月8日、2011年5月8日。表1给出了两个溢油影像的详细成像参数。
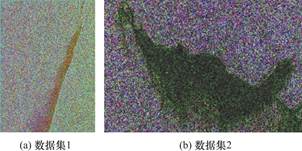
图1 Radarsat-2溢油影像数据集
Fig.1 Radarsat-2 oil spill image dataset
表1 两景Radarsat-2数据详细成像参数
Table 1 Two views Radarsat-2 data imaging parameters
|
数据集
|
数据1
|
数据2
|
|
成像系统
|
Radarsat-2
|
Radarsat-2
|
|
数据格式
|
SLC
|
SLC
|
|
极化方式
|
HH,HV,VV,VH
|
HH,HV,VV,VH
|
|
空间分辨率
|
4.73m×5.27m
|
4.73m×4.95m
|
2.2 溢油影像极化特征的提取
Radarsat-2全极化SAR数据通过四种极化方式(HH、HV、VH、VV)可以捕捉目标在不同极化状态下的完整散射特性,这极大地增强了对地物目标信息的提取能力。因此,本文对全极化SAR数据提取了30种与极化SAR溢油检测密切相关的特征参数。
(1)极化总功率Span[6]:考虑了不同极化方式下的信号强度,是对所有极化通道的功率相加,其定义如下式:
Span= +
+ +
+ +
+ (1)
(1)
式中,SHH,SHV,SVV,SVH为极化散射矩阵中HH,HV,VV,VH通道对应的复散射系数。
(2)几何强度[7]:反映了目标在不同极化状态下的后向散射能量分布。如下式所示:
v= (2)
(2)
式中,T是极化相干矩阵。
(3)VV强度[8]:反映了目标在VV极化状态下的后向散射能量。其公式可以表示为:
IVV=(3)
式中,SVV表示垂直发射-垂直接收极化通道的散射系数。
(4)共极化相位差标准差[9]:用于描述共极化通道(HH和VV)之间相位差的统计变化特性。它反映了目标散射机制的复杂性和空间分布的均匀性。
σϕCO= (4)
(4)
式中,φhh和φvv分别HH和VV极化通道对应的相位信息,<·>表示求整体平均值。
(5)同极化功率比:水平极化通道(HH)与垂直极化通道(VV)之间的功率比。
γCO= (5)
(5)
式中,SHH,SVV表示为HH和VV极化通道的散射系数。
(6)同极化相关系数:用于描述HH和VV极化通道之间的相关性,反映了目标在极化状态下的散射回波一致性的程度。
ρCO= (6)
(6)
式中,SHH,SVV为HH和VV极化通道的散射系数。
(7)同极化交叉项实部[65]:是从目标的散射矩阵中提取的,表示地物在极化状态下的相干交叉散射强度。
rCO= (7)
(7)
式中,R表示取复数的实部,SHH,SVV为散射矩阵元素,*表示共轭。
(8)Muller矩阵:用于表征入射雷达波与地物相互作用后,回波信号在不同极化态之间的转换和分布。定义如下:
M33=<Re(SHH +>(8)
+>(8)
(9)一致性系数:是通过计算两个极化通道HH和VV之间的复相关系数得到的。通常情况下,若海面为清洁画面,一致性系数大于0,若非清洁海面,一致性系数小于0。
μ= (9)
(9)
(10)极化熵H[10]:用于表示地物散射的随机性与复杂程度。
H=- pilog3pi(10)
pilog3pi(10)
式中,pi= ,λi为特征值。
,λi为特征值。
(11)各向异性A:用于描述目标表面的粗糙程度。
A= (11)
(11)
式中,λi为特征值。
(12)平均散射角α:用于描述目标散射机制的平局特性,反映了目标地物的散射类型。
 =piαi(12)
=piαi(12)
式中,αi每个特征值对应的特征向量所表示的散射机制的角度。
(13)各向异性参数A12:通过极化相干矩阵的特征值计算,反映了目标散射特性的各向异性程度。
A12= (13)
(13)
式中,λi为极化相干矩阵的特征值。
(14)最大特征值[11]:反映目标表面散射特性中的主要散射机制。
λmax=max(λ1,λ2,λ3)(14)
式中,λi为特征值。
(15)基准高度:表示地物散射回波中的非极化成分的强度。
PH= (15)
(15)
式中,λi为特征值。
(16)平均强度值:表示在特定极化通道下,雷达回波信号的强度值。
I=λ1·p1+λ2·p2+λ3·p3(16)
式中,λi,pi分别为极化分解的特征值和向量。
(17)SERD:用来描述地物目标散射表面的粗糙程度。
SERD= (17)
(17)
(18)极化特征P:用来描述地物散射目标机制中布拉格散射机制和镜面散射机制在总散射机制中所占的比重。
P= (18)
(18)
(19)布拉格散射占比[12]:布拉格散射是由于粗糙表面而产生的雷达回波散射机制。布拉格散射占比是在SAR溢油影像布拉格散射对总体散射回波信号的贡献程度。通常情况下,清洁的海面主要是以布拉格散射为主,而当由溢油事故发生时,海面变得光滑,此时,布拉格散射不再占据主导地位,因此定义布拉格散射能量占比可以用于溢油检测:
η= =
= (19)
(19)
式中,PBragg为布拉格散射能量,Span为总功率,Tii为极化相干矩阵的元素。
(20)自相似性参数:它是基于极化相干矩阵中Pauli基来定义的,用来描述地物目标表面发生散射回波的随机性,其公式为:
rr= =
= (20)
(20)
其中,自相似性参数取值范围为 ,T为极化相干矩阵。
,T为极化相干矩阵。
(21)散射多样性:通过计算相干矩阵的特征值得到,用于描述不同地物的散射特性。
SD= =
= (21)
(21)
式中,Trace为极化相干矩阵的迹。
(22)表面散射分数:用来描述表面散射在极化总功率中所占的比重。
N11= (22)
(22)
(23)组合特征F:通过组合极化熵、各向异性、同极化相关系数、平均散射角得到,其公式为:
F= /4(23)
/4(23)
式中, =1-H,
=1-H, =1-α。
=1-α。
(24)H_A12组合参数:用于描述目标的随机散射特性。
H-A12=H (24)
(24)
式中,A12为各向异性参数,H为极化熵。
(25)H_A组合参数:
H-A= (25)
(25)
(26)CT:是由极化相干矩阵、极化协方差矩阵中的特征值计算得到,其中公式可以表示为:
CT= (26)
(26)
式中,C13为极化协方差矩阵的特征值,T11和T33为极化相干矩阵的特征值。
(27)相干系数:描述变量间相关性的一个指标。
cho= (27)
(27)
(28)交叉极化比:描述不同极化通道之间散射回波强度比的一种特征,其公式为:
C= (28)
(28)
(29)极化度:表示了电磁波中极化部分与总能量的比例。
DoP= (29)
(29)
式中,M为Muller矩阵。
(30)Gini系数:用来衡量地物目标散射回波在极化状态下的分布不均衡程度。其公式如下:
Pgini=1- (30)
(30)
式中,pi为回波强度分布中不同极化通道的比例,有pi=。
2.3 溢油影像纹理特征的提取
影像的纹理特征用于描述图像灰度值的空间分布规律与相关性,反映揭示地物表面结构的细节。通常情况下,海表面的纹理是粗糙的,但是当海上发生溢油事故时,浮油会附着在海水表面,抑制了海表面的毛细波和短重力波,这就会改变海洋表面的纹理,使其变得光滑。而纹理特征通常表现为不同尺度和方向上的规律性波动,能够反映地物表面是否平滑、粗糙。本文基于灰度共生矩阵来提取Radarsat-2影像的纹理特征。
灰度共生矩阵法(Gray Level CO-Occurrence Matrix,GLCM)是通过分析图像中像素对在特定方向和距离上的灰度值构建的。GLCM的计算公式如下:
fd,θ(i,j)= (31)
(31)
式中,Pd,θ(i,j)表示像素对i和j同时出现的次数,d表示为像素对i和j的距离,θ为像素对间的方向,N表示灰度级的量化。在本文中,为提取SAR影像在不同方向上的纹理特征,采用了四个方向求平均的方法。基于此,提取了十种纹理特征。同时,通过设置不同的窗口大小(分别为5、7、9),共获得了30个纹理特征。其中十种纹理特征的数学表达式如下:
(1)角二阶矩(ASM):用于描述影像灰度分布均匀性和纹理粗细程度的一种特征。若角二阶矩的值越大,表示图像灰度分布均匀,纹理较粗。若角二阶矩的值越小,表示图像灰度分布不均匀,纹理较细。
ASM= p(i,j)2(32)
p(i,j)2(32)
(2)对比度(CON):用于描述图像中局部灰度变化的大小,反映图像的清晰度和纹理的对比度。若对比度的值越大,表示图像中局部灰度变化较大,纹理对比度较高。若对比度的值越小,表示图像中局部灰度变化较小,纹理对比度较低。
CON=p(i,j)2×(i-j)2(33)
(3)相异性(DIS):用于描述图像中灰度值的差异程度。若图像灰度值的差异越大,则相异性的值越高,图像灰度值的差异越小,其值越低。
DIS= p(i,j)(34)
p(i,j)(34)
(4)能量(ENE):表示图像纹理结构复杂程度。
ENE= (35)
(35)
(5)熵(ENT):用于描述图像灰度分布的随机性的一种特征。若熵值越大,表示图像灰度分布的随机性越高,纹理结构混乱。反之,则随机性越低,纹理结构有序。
ENT=-p(i,j)×lgp(i,j)(36)
(6)相关性(COR):用于描述图像纹理间的相关程度。
COR= (37)
(37)
(7)均值(MEA):用于描述图像的亮度。均值越小的区域,图像的亮度越低。均值越大的区域,图像的亮度越高。
MEA=ip(i,j)(38)
(8)方差(VAR):用于描述图像灰度值的离散程度。
VAR= p(i,j)×(i-Mean)2(39)
p(i,j)×(i-Mean)2(39)
(9)同质性(HOM):用于描述图像中局部区域的相似性。其值越高,表示图像中局部区域灰度值相似,纹理较平滑。反之,表示图像中局部区域灰度值差异较大,纹理较粗糙。
HOM= (40)
(40)
(10)最大概率:反映了图像中最大的灰度值。
MAX= p(i,j)(41)
p(i,j)(41)
2.4 基于RF-RFECV特征优选算法原理
为减少人为选择特征的主观性,模型可以自主计算分析,选择最佳的特征子集,本文构建了基于RF-RFECV(Random Forest-Recursive Feature Elimination Cross Validation,RFECV)特征优选方法,通过迭代消除的方法筛选特征并评估模型性能,最终确定最佳的特征组合。
设训练集为D,基于随机森林的交叉验证递归特征消除算法的步骤具体如下:
(1)将D分成K个子集,K为交叉验证的次数。
(2)初始化随机森林模型,随机选择K-1份子集输入模型进行训练,剩余1份用于验证。
(3)根据随机森林模型的评估,计算每个特征的重要性,特征Xj在第i棵树的重要性VI 计算公式为:
计算公式为:
VI= VI
VI (42)
(42)
式中,I为树的棵数,Q为特征Xj在树i中出现的节点集合。
VI=Gin -Gin
-Gin -Gin
-Gin (43)
(43)
式中,Gin为特征在第i棵树节点q的重要性,Gin和Gin分别表示分枝后两个新节点的Gini指数。
Gin的计算公式为:
Gin= =1-
=1- (
( )2(44)
)2(44)
式中,C为类别数。
(4)根据重要性得分,剔除重要性最小的特征,并对特征子集进行更新,更新后的特征子集将重新进行训练并评估模型。
(5)重复迭代,从完整的特征集开始,逐步去除对分类准确性没有贡献的特征或贡献较低的特征。每次迭代会使用不同的验证子集,直至完成迭代过程。
(6)选择交叉验证得分最高的子集作为特征优选结果。
2.5 特征优选结果
为保证优选特征子集实验的公平性,对实验所用的数据集各自选取11228个像素作为输入数据进行特征优选。其中,两景影像海水和油膜的像素数量都为5614。
经过基于RF-RFECV的算法处理,Radarsat-2数据集1从极化特征和纹理特征中优选出了16种特征,数据集2最终选出了18种特征。表2和表3分别展示了Radarsat-2数据集1、数据集2中经过特征优选后的特征组合及其对应的重要性得分。
表2 数据集1优选特征的重要性得分
Table 2 The feature importance scores of the selected features for dataset 1
|
|
特征
|
重要性得分
|
|
1
|
最大特征值
|
5.034
|
|
2
|
Gini系数
|
4.864
|
|
3
|
几何强度
|
4.725
|
|
4
|
均值(7×7)
|
3.695
|
|
5
|
方差(5×5)
|
3.673
|
|
6
|
自相似性参数
|
3.643
|
|
7
|
平均强度值
|
3.514
|
|
8
|
极化总功率
|
3.460
|
|
9
|
最大概率(9×9)
|
3.064
|
|
10
|
同极化交叉项实部
|
2.018
|
|
11
|
VV强度
|
1.919
|
|
12
|
表面散射分数
|
1.678
|
|
13
|
极化熵
|
1.567
|
|
14
|
最大概率(7×7)
|
0.878
|
|
15
|
角二阶矩(7×7)
|
0.738
|
|
16
|
均值(5×5)
|
0.718
|
表3 数据集2优选特征的重要性得分
Table 3 The feature importance scores of the selected features for dataset 2
|
|
特征
|
重要性得分
|
|
1
|
VV强度
|
5.203
|
|
2
|
平均强度值
|
5.124
|
|
3
|
极化度
|
4.722
|
|
4
|
最大特征值
|
4.614
|
|
5
|
方差(5×5)
|
4.714
|
|
6
|
同质性(7×7)
|
4.613
|
|
7
|
极化熵
|
2.814
|
|
8
|
Gini系数
|
2.661
|
|
9
|
相异性(7×7)
|
2.578
|
|
10
|
平均散射角α
|
2.323
|
|
11
|
组合特征F
|
2.041
|
|
12
|
均值(5×5)
|
2.015
|
|
13
|
一致性系数
|
1.934
|
|
14
|
相关性(7×7)
|
1.876
|
|
15
|
方差(9×9)
|
1.721
|
|
16
|
基准高度
|
1.469
|
|
17
|
布拉格散射占比
|
1.379
|
|
18
|
对比度(9×9)
|
1.058
|
3 溢油检测结果与分析
为评估基于RF-RFECV的特征优选算法的性能,使用支持向量机、决策树、和BP神经网络3种分类器作比较。采用整体精度(OA)、平均准确率(AA)、Kappa系数、Precision、Recall这5个评价指标来对模型的分类效果进行评估,综合评价溢油检测的效果。
3.1 特征优选前不同分类器的精度比较
将优选前的特征,输入3种分类器中进行溢油检测,分类精度及其溢油检测效果图如下所示。
通过对SVM、DT和BP神经网络在数据集1上的性能对比分析,结果表明支持向量机在整体精度(OA)和平均精度(AA)等指标上均优于决策树和BP神经网络。从溢油检测效果图可以观察到,支持向量机对溢油区域的识别能力较好,但仍存在误检和漏检现象。相比之下,BP神经网络与决策树的检测结果呈现出明显的噪声干扰和较多的误检区域。实验结果表明,在未进行特征优选的情况下,虽然这些分类器都展现出了一定的分类能力,但其检测精度和召回率仍有较大的提升空间。
表4 数据集1特征优选前不同分类器的识别精度
Table 4 Recognition accuracy of different classifiers before feature optimization for dataset 1
|
分类器
|
OA(%)
|
AA(%)
|
Kappa
|
Precision(%)
|
Recall(%)
|
|
支持向量机
|
0.69
|
0.70
|
0.71
|
0.77
|
0.74
|
|
决策树
|
0.65
|
0.67
|
0.68
|
0.78
|
0.67
|
|
BP神经网络
|
0.63
|
0.65
|
0.62
|
0.72
|
0.66
|
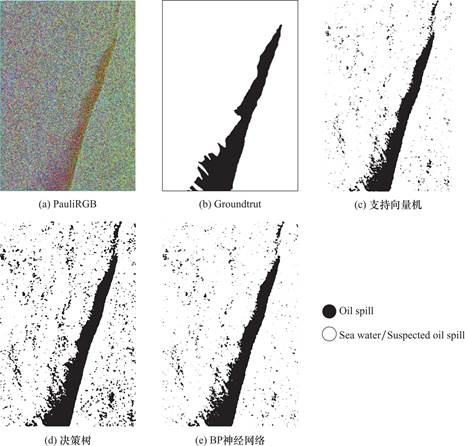
图2 数据集1特征优选前溢油检测结果图
Fig.2 Plot of oil spill detection results before feature optimization for dataset 1
表5 数据集2特征优选前不同分类器的识别精度
Table 5 Recognition accuracy of different classifiers before feature optimization for dataset 1
|
分类器
|
OA(%)
|
AA(%)
|
Kappa
|
Precision(%)
|
Recall(%)
|
|
支持向量机
|
0.67
|
0.72
|
0.67
|
0.73
|
0.72
|
|
决策树
|
0.68
|
0.64
|
0.67
|
0.73
|
0.70
|
|
BP神经网络
|
0.64
|
0.68
|
0.70
|
0.69
|
0.68
|
通过对SVM、DT和BP神经网络在数据集2上的性能对比分析,决策树在整体精度上略高于支持向量机和BP神经网络,但其平均精度较低。BP神经网络的Kappa系数最高。支持向量机在平均精度和召回率上表现较好。进一步分析溢油检测效果图,可以观察到三种分类器均能标出溢油位置,但存在较多噪声和误检区域,表明其在处理高维数据时存在一定的局限性。综上所述,决策树相较于其他两种分类器略有优势,但在平均精度上表现较差,表明其在某些类别上的分类效果可能不够理想。BP神经网络在Kappa系数上表现较好,但在整体精度和精确度上相对较低。总体而言,特征优选前的检测结果说明高维特征对溢油检测存在一定干扰,导致其在溢油检测任务中的表现不够理想。
3.2 特征优选后不同分类器的检测结果比较
基于RF-RFECV优选的特征,输入3种分类器中进行溢油检测,分类精度及其溢油检测效果图如下所示。
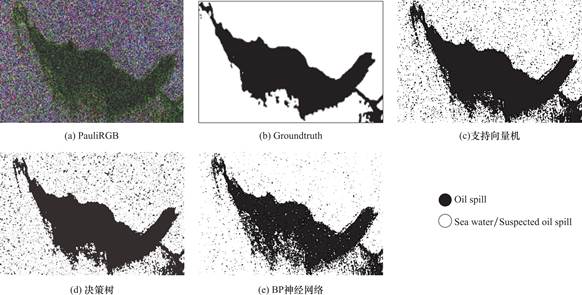
图3 数据集2特征优选前溢油检测结果图
Fig.3 Plot of oil spill detection results before feature optimization for dataset 2
表6 数据集1特征优选后不同分类器的识别精度
Table 6 Recognition accuracy of different classifiers after feature optimization for dataset 1
|
分类器
|
OA(%)
|
AA(%)
|
Kappa
|
Precision(%)
|
Recall(%)
|
|
支持向量机
|
0.73
|
0.83
|
0.82
|
0.85
|
0.86
|
|
决策树
|
0.72
|
0.78
|
0.80
|
0.86
|
0.76
|
|
BP神经网络
|
0.84
|
0.82
|
0.87
|
0.89
|
0.77
|
通过对数据集1进行特征优选后得溢油检测结果,分析可以得出,BP神经网络在整体精度(OA)和Kappa系数上表现最佳,分别为84%和0.87,表明其在分类任务中具有较高的准确性和一致性。支持向量机在平均精度(AA)和召回率(Recall)上表现较好,分别为83%和86%,显示出其在检测溢油时具有较高的敏感性和识别能力。决策树在精度(Precision)上表现最佳,达到86%。对比3.1节特征优选前的溢油检测效果图,可以得出,特征优选后BP神经网络在检测溢油区域时具有较高的准确性,能够较为清晰地识别出溢油区域,且误检率较低。决策树与支持向量机的检测结果则显示出其在处理复杂背景时的局限性,部分溢油区域未能被有效识别。
综合精度指数和检测效果图的分析,可以得出结论:特征优选对溢油检测的效果具有显著影响。通过特征优选,各分类器的精度指标和检测效果均得到了不同程度的提升。具体而言,优选后的特征不仅提高了分类器的整体精度(OA)、平均精度(AA)和Kappa系数,还在实际检测效果图中表现出更准确的溢油区域识别能力,减少了误检和漏检的情况。这表明特征优选在优化分类器性能方面发挥了重要作用,为提升溢油检测的准确性和可靠性提供了有力支持。
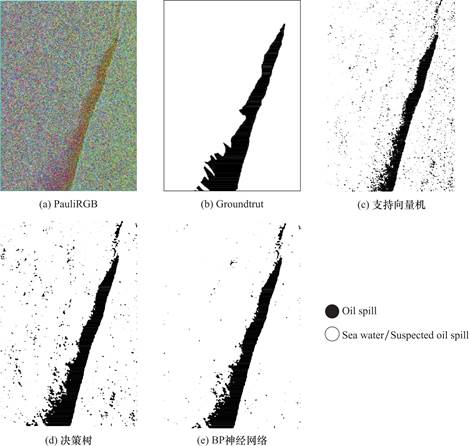
图4 数据集1特征优选后溢油检测结果图
Fig.4 Plot of oil spill detection results before after optimization for dataset 1
表7 数据集2特征优选后不同分类器的识别精度
Table 7 Recognition accuracy of different classifiers after feature optimization for dataset 1
|
分类器
|
OA(%)
|
AA(%)
|
Kappa
|
Precision(%)
|
Recall(%)
|
|
支持向量机
|
0.75
|
0.80
|
0.83
|
0.85
|
0.84
|
|
决策树
|
0.75
|
0.74
|
0.82
|
0.79
|
0.85
|
|
BP神经网络
|
0.86
|
0.79
|
0.84
|
0.85
|
0.83
|
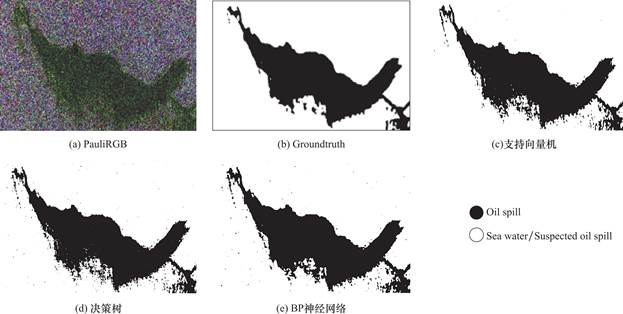
图5 数据集2特征优选后溢油检测结果图
Fig.5 Plot of oil spill detection results before after optimization for dataset 2
通过对数据集1进行特征优选后得溢油检测结果,分析可以得出,SVM在OA和AA上分别达到了75%和80%,Kappa系数为0.83,显示出较好的分类一致性。其精确率和召回率分别为85%和84%,表明SVM在识别溢油时具有较高的准确性和检测能力。决策树在OA和AA上均为75%和74%,Kappa系数为0.82,略低于SVM。其精确率为79%,召回率为85%,显示出较高的检测灵敏度,但在精确度上稍显不足,说明在处理高维数据时可能出现过拟合现象。BP神经网络在OA上达到了86%,显著高于SVM和决策树,AA为79%,Kappa系数为0.84,显示出较好的分类性能。其精确率和召回率分别为85%和83%,表明BP神经网络在溢油检测中具有较高的综合性能。
通过对精度指数和检测效果图的综合分析,可以得出:特征优选在溢油检测中起到了至关重要的作用。经过特征优选后,各分类器的性能指标均得到了显著提升,包括整体精度(OA)、平均精度(AA)和Kappa系数。在实际检测效果图中,优选后的特征使得分类器能够更精确地识别溢油区域,显著减少了误检和漏检的情况。这一结果表明,特征优选不仅优化了分类器的性能,还大幅提高了溢油检测的准确性和可靠性。因此,特征优选是提升溢油检测效果的关键步骤,为相关研究和实际应用提供了重要的技术支撑。
4 结论
本文利用两景Radarsat-2全极化数据,提出了一种RF-RFECV的海洋溢油特征优选方法。该方法旨在通过特征优选提升溢油检测的准确性和可靠性。首先,从Radarsat-2全极化数据中提取了丰富的极化特征和纹理特征。随后,利用RF-RFECV算法计算每个特征在区分溢油、疑似溢油及海水类别中的重要性系数,最终为两景影像分别优选了16种和18种特征,构成最优特征组合。在特征优选的基础上,我们将优选前后的特征分别输入支持向量机(SVM)、决策树(DT)和BP神经网络三种分类器进行比较。实验结果表明,经过特征优选后,所有分类器的性能均有显著提升,其中BP神经网络分类器的表现尤为突出,其总体准确率(OA)、平均准确率(AA)、Kappa系数、精确率(Precision)和召回率(Recall)等评价指标均得到了明显改善。
此外,从溢油检测结果的可视化影像来看,经过特征优选后,三种分类器的溢油检测效果均有所提升,误检率显著降低。特征优选后的分类器能够更准确地识别溢油区域,减少了对疑似溢油的误判。这表明本文提出的RF-RFECV特征优选方法在溢油检测中具有重要的应用价值。
综上所述,本文提出的基于RF-RFECV的海洋溢油特征优选方法不仅能够有效提升分类器的性能,还能显著改善溢油检测的视觉效果和准确性。该方法为Radarsat-2全极化数据在海洋溢油监测中的应用提供了新的思路和技术支持,具有广泛的应用前景。未来的研究可以进一步探索该方法在其他遥感数据和多场景下的适用性,以推动海洋溢油监测技术的发展。
利益冲突: 作者声明没有利益冲突。
[②] *通讯作者 Corresponding author:宋冬梅,songdongmei@upc.edu.cn
收稿日期:2025-03-10; 录用日期:2025-03-19; 发表日期:2025-03-28
基金项目:本研究得到国家自然科学基金(资助号:U22A20586,41772350,61371189)、山东省重点研发计划项目(资助号:2019GGX101033)的资助。
参考文献(References)
[1] 魏铼, 胡卓玮. 基于合成孔径雷达影像的海洋溢油纹理特征参数分析[J]. 海洋学报(中文版), 2013, 35(01): 94-103.
https://doi.org/10.3969/j.issn.0253-4193.2013.01.011.
[2] Lang H, Zhang X, Xi Y, et al. Dark-spot segmentation for oil spill detection based on multifeature fusion classi- fication in single-pol synthetic aperture radar imagery[J]. Journal of Applied Remote Sensing, 2017, 11(1): 015006-015006.
https://doi.org/10.1117/1.jrs.11.015006.
[3] 马龙, 李颖, 牛莹. 结合纹理的支持向量机合成孔径雷达溢油监测[J]. 中国航海, 2010, 33(01): 75-79.
https://doi.org/10.3969/j.issn.1000-4653.2010.01.017.
[4] Zhang B, Perrie W, Li X, et al. Mapping sea surface oil slicks using RADARSAT-2 quad-polarization SAR image[J]. Geophysical Research Letters, 2011, 38(10): L10602.
https://doi.org/10.1029/2011GL047013.
[5] Minchew B, Jones C E, Holt B. Polarimetric analysis of backscatter from the Deepwater Horizon oil spill using L-band synthetic aperture radar[J]. IEEE Transactions on Geoscience and Remote Sensing, 2012, 50(10): 3812-3830.
https://doi.org/10.1109/TGRS.2012.2185804.
[6] Wenguang W, Fei L, Peng W, et al. Oil spill detection from polarimetric SAR image[C]//IEEE 10th INTERNATIONAL CONFERENCE ON SIGNAL PROCESSING PROCEEDINGS. 2010: 832-835.
https://doi.org/10.1109/icosp.2010.5655943.
[7] Skrunes S, Brekke C, Eltoft T. An experimental study on oil spill characterization by multi-polarization SAR[C]// EUSAR 2012; 9th European Conference on Synthetic Aperture Radar. 2012: 139-142.
https://doi.org/10.1016/0021-9991(92)90317-R.
[8] Pottier J S L Eric. Polarimetric Radar Imaging: From Basics to Applications[M]. Boca Raton: CRC Press, 2017.
https://doi.org/10.1201/9781420054989.
[9] Migliaccio M, Nunziata F, Montuori A, et al. A Multifrequency Polarimetric SAR Processing Chain to Observe Oil Fields in the Gulf of Mexico[J]. IEEE Transactions on Geoscience and Remote Sensing, 2011, 49(12): 4729-4737.
https://doi.org/10.1109/TGRS.2011.2158828.
[10] Cloude S R, Pottier E. A review of target decomposition theorems in radar polarimetry[J]. IEEE Transactions on Geoscience and Remote Sensing, 1996, 34(2): 498-518.
https://doi.org/10.1109/36.485127.
[11] Lee J S. Refined filtering of image noise using local statistics[ J]. Computer Graphics and Image Processing, 1981, 15(4): 380-389.
https://doi.org/10.1016/S0146-664X(81)80018-4.
[12] Yang F, Yang J, Yin J. Freeman’s decomposition model based new spill detector[C]//2013 IEEE International Geoscience and Remote Sensing Symposium-IGARSS. Melbourne, Australia: IEEE, 2013: 3211-3214.
https://doi.org/10.1109/IGARSS.2013.6723510.
Feature Optimization of Marine Oil Spill Polarimetric SAR Based on RF-RFECV
WANG Shuzhen, SONG Dongmei*
(College of Oceanography and Space Informatics, China University of Petroleum (East China) , Qingdao 266580, China)
Abstract: Marine oil spills have caused serious damage to the ecosystem and the environment, and timely and accurate detection of oil spills on the ocean surface is of vital significance to the maintenance of the marine ecological balance and the protection of the environment. At present, in terms of oil spill detection, the oil spill feature selection method is artificially subjective, the feature utilisation efficiency is low, and the application of multiple different feature combinations is less involved. For this reason, a RF-RFECV marine oil spill feature intelligent preference strategy based on RF-RFECV is proposed. The polarisation features and texture features of Radarsat-2 images are extracted systematically to construct a multi-dimensional feature space. The algorithm autonomously calculates the differentiation weights of each feature in the categories of oil spill, suspected oil spill and seawater, and finally selects the 16/18-dimensional optimal feature combinations for Radarsat-2 data. The experimental results show that the use of the optimal features for oil spill detection effectively improves the accuracy of oil spill detection, reduces the cases of misdetection and omission, and fully proves the effectiveness of the algorithm.
Keywords: RF-RFECV, marine oil spill, feature selection, polarimetric SAR
DOI: 10.48014/ais.20250310001
Citation: WANG Shuzhen, SONG Dongmei. Feature optimization of marine oil spill polarimetric SAR based on RF-RFECV[J]. Acta Interdisciplinary Science, 2025, 2(1): 10-21.
