基于深度学习的地震速度反演方法研究
许旺1, 王非翊2,*, 张志强1, 刘恭利1, 段新意1
(1. 中海石油 (中国) 有限公司天津分公司, 天津 300459
2. 北京大学地球与空间科学学院, 北京 100871)
摘要: 获得地震速度的方法包括偏移速度分析、层析速度反演和全波形反演, 但这些方法都有共同的问题: 随着地震数据量的增大, 处理数据获得地震速度的时间成倍增加, 且后两种方法对初始地震速度依赖性较强。针对以上方法所存在的问题, 本文改进了一种基于深度学习的地震速度反演方法。同时提出了一种随机生成大量速度模型的方法, 该方法生成的速度模型拥有与真实地下构造相近的地质特征 (起伏层、断层、异常体等) 。利用生成的速度模型和波动方程进行正演, 可以实现数据集的高效建立。本文改进的深度学习反演方法基本原理为: 通过卷积神经网络提取训练数据的特征信息, 经过大数据训练, 获得地震炮记录和地震速度的非线性映射关系。在反演阶段, 将地震炮记录输入训练好的网络, 可以快速地反演出地震速度。为了使该网络充分发挥处理地震数据的优势, 作者通过数值模拟的方式获得了优势网络结构, 并取得了令人满意的反演结果, 最后本文通过对比实验, 验证了该方法的优势和适用性。
关键词: 地震速度, 深度学习, 卷积神经网络, 数据集, 反演问题
DOI: DOI:10.48014/cpngr.20230425002
引用格式: 许旺, 王非翊, 张志强, 等. 基于深度学习的地震速度反演方法研究[J]. 中国石油天然气研究, 2023, 2(2): 15-24.
文章类型: 研究性论文
收稿日期: 2023-04-25
接收日期: 2023-05-20
出版日期: 2023-06-28
0 引言
石油能源被称为工业发展的血液是国家安全的重要战略资源,其副产品也应用于百姓生活的各个方面。在整个石油行业产业链中,油气勘探作为生产开发的第一步,直接影响着国内油气产业的发展。地震数据处理是石油天然气等矿产资源勘探中的重要组成部分,拥有高分辨率成像结果和优质地质解释的关键前提是取得准确的地下速度模型,获取地下速度模型的一种经典方法是层析速度反演,该方法利用地震走时等信息,通过反复迭代计算,寻求模拟数据和观测数据之间的旅行时最小,再借助优化方法反演出所需的速度模型。另一种获取地震速度的常用方法是全波形反演,它起源于20世纪80年代初。无论是勘探尺度的增大、震源的数量增加还是采集时间增长都会使得这些方法的时间成本的显著提高,并且反演结果受制于从业员的主观想法和经验丰富程度,在特定情况下这些方法的使用会受到限制,因此,众多专家学者尝试引入新的技术来解决上述问题。
在最近的十几年,深度学习的基础理论快速发展,深度学习基础理论再度优化[1-3],神经网络算法再次成为研究热点。在整个学术界,数据驱动的深度学习已经成为最重要的研究课题之一,越来越多的领域开始引入深度学习方法来解决各自领域的问题[4],如层位识别[5]、层位解释[6]、地震通道解释[7]等,这为地震资料处理提供了新思路。1994年Roth[8]首次提出了神经网络在地震勘探数据处理方面的应用。近些年有更多的专家学者开始将人工智能与地震速度建模相结合,Nath[9]利用机器学习方法,进行井间地震速度的反演,取得了不错的结果。由于缺少成对的地震速度和地震炮记录作为样本集,Zhu[10]提出利用生成对抗网络来生成训练数据尝试解决这一问题。Araya-Polo等[11]通过将深度神经网络训练为层析算子来获得速度模型。同一时期Wu等[12]提出了InversionNet网络模型,实现了原始地震数据到速度模型的映射,但此时的数据集极为简单,无法很好地体现地质构造和特征。Yuan[13]在已知初始速度和数据的情况下,用全卷积神经网络(Full Convolution Net,FCN)实现了时移数据和目标速度之间的映射,Yang[14]基于 FCN 提出了直接使用全波形地震数据建立速度模型的方法。本文作者尝试将深度学习引入地震数据处理的速度建模部分,借助其优秀的学习能力和极高反演效率的优势解决传统方法的效率问题。与传统的基于先验地球物理知识的反演方法不同,深度学习方法基于大数据训练。在训练阶段的目的是建立输入数据与输出数据的非线性关系,在反演阶段,由于建立了良好的数据关系,省去了常规方法存在的众多复杂梯度运算,因此反演效率极高。深度学习方法的另一个关键特征是不需要人为干预和设置初始速度,较传统方法更容易入门使用。
每位深度学习领域的专家学者都会面临一个难题——大体积数据集的建立,该问题在地震勘探领域尤为突出。因此本文提出一种自动生成大量符合地质特征的速度模型的方法,该方法可以在不需要大量人工的情况下自动构建设定数量的速度模型,并且保证这些速度模型的层数、断层数、异常体形状等都可以随机变化。
1 地震数据集的建立方法
1.1 速度模型的建立方法
(1)层位生成方法
要设计一个含有丰富地质特征的速度模型,首先需生成一个基础的起伏层结构模型,然后在其基础上随机添加断层或异常体构造。该研究思路的部分内容来源于Ren[15]和Liu[16]对速度模型创建方法。
该方法的主要实现的目的是能够随机生成大量符合需求的速度模型,因此随机函数是必不可少的。对于起伏层模型,首先需要确定生成起伏层的形态,然后设定好随机生成层位数量,同时确保每层的形态都有所差异,最后为每层地层填充速度值。
为了保证模型泛化性,可以预先设置一个层数可选范围如4~8层,让每个速度模型都可以在这个范围内随机生成层位,除此之外需要每层界面都有自己的特点,其中起伏程度和层厚等都要不同。
本文定义了一个由三角函数和线性方程组成的复合函数,以生成连续、波动和复杂的曲线,函数方程如下所示:
 (1)
(1)
 (2)
(2)
 (3)
(3)
式中, 为三角函数的振幅值;
为三角函数的振幅值; 为位移值;
为位移值; 为模型横向大小;
为模型横向大小; 为模型纵向大小,
为模型纵向大小, 为随机层数,
为随机层数, 为随机数,
为随机数, 为长度范围内的周期。
为长度范围内的周期。
上面公式中A主要控制随机生成不同层数的速度模型,B主要控制生成的速度模型中起伏地层的形态。通过上面的定义,可以获得具有相同趋势的多个层位。图1显示的即为生成的简单速度模型示意图。
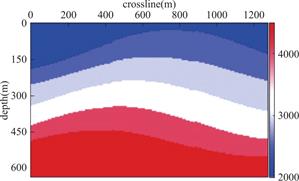
图1 拥有相近趋势界面速度模型
Fig.1 Velocity model with similarly trending interfaces
拥有构造特征之后,需要为这些构造赋予物理含义,也就是填充速度值,根据沉积学和地质学的先验知识了解到,层位的速度值随着地层的加深依次增大。根据经验,设置相邻层之间的速度差大于200m/s,根据所需的最大速度 、上一层介质的速度
、上一层介质的速度 、下一层介质的数量
、下一层介质的数量 以及随机项
以及随机项 ,选择每层介质的波速范围。速度范围如下:
,选择每层介质的波速范围。速度范围如下:
 (4)
(4)
通过上述层位设计、界面设置和速度分配过程,该方法可以构建出与地下构造相近的拥有起伏特征的速度模型。
(2) 断层和异常体生成方法
为了更加符合真实地下构造,同时为速度模型增加更丰富的地质特征,本文在起伏层模型的基础上,进一步添加断层的构造。将起伏层模型 和断层线
和断层线 作为输入,并在原速度模型的随机位置生成断层。可以定义为对角线或抛物曲线。为了提高了模型的丰富度,断层会在设定的范围内随机生成。对于移动部分的每个点
作为输入,并在原速度模型的随机位置生成断层。可以定义为对角线或抛物曲线。为了提高了模型的丰富度,断层会在设定的范围内随机生成。对于移动部分的每个点 ,更新的位置
,更新的位置 可以通过以下等式计算:
可以通过以下等式计算:
 (5)
(5)
为了进一步丰富模型信息同时提高模型的复杂度,按照类似的步骤,通过添加随机数,设计了可以随机生成多个断层的方法。图2显示了生成的2条断层速度模型。
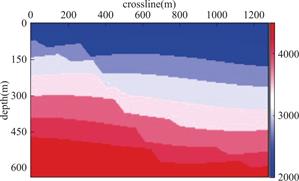
图2 断层模型
Fig.2 Fault model
接下来是生成异常体,首先需要确定异常体的形状。本文以三角形和矩形为基本形状加入了两类异常体。其次是确定异常体的大小、位置和填充的速度。为增加模型的泛化性,异常体的大小、位置以及填充的速度都是在预设好的范围内随机选择。
矩形状异常体由四个坐标 控制,这四个坐标由随机选定的异常体大小和位置决定,在速度场中以矩形的形式分布,然后将其连接成密闭图形,并在各边加上一定幅度的随机扰动使其不规则化,最后填充入异常体的速度值。同理,三角状的异常体由三个坐标点控制,生成异常体的效果如图3所示。
控制,这四个坐标由随机选定的异常体大小和位置决定,在速度场中以矩形的形式分布,然后将其连接成密闭图形,并在各边加上一定幅度的随机扰动使其不规则化,最后填充入异常体的速度值。同理,三角状的异常体由三个坐标点控制,生成异常体的效果如图3所示。
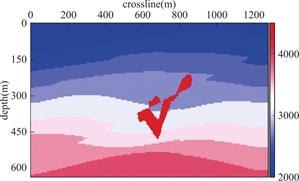
图3 复杂模型
Fig.3 Complex model
1.2 炮记录数据集建立方法
前文提到了如何生成符合地质条件的速度模型,接下来介绍如何获取样本集中的另一个关键组成部分:地震炮记录。
在实际生产中获取地震炮记录通常做法是放置人工震源,激发地震波场,利用地面接收器记录地震波,模型试算则是利用计算机来模拟这一过程,进而获得模拟地震炮记录。图4显示实现该模拟过程的流程图。
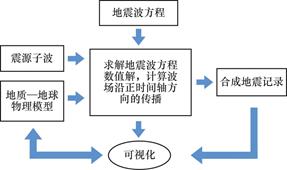
图4 正演模拟流程图[17]
Fig.4 Seismic forward modeling flow chart
正演模拟参数包括:震源数量、正演的横纵向采样间隔、网格大小、炮记录的采样时长、时间采样间隔、主频等。图5为图1速度模型对应的地震炮记录。
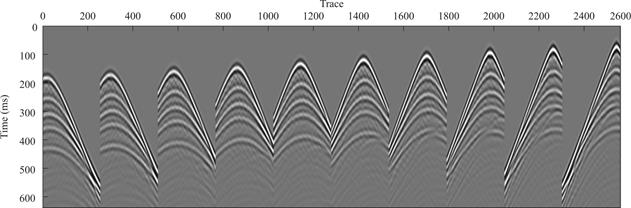
图5 地震炮记录
Fig.5 Seismic gun record
本文创建数据集包括5200个速度模型和5200个对应地震炮记录,总大小为61.28G,其中4500对作为训练集,为网络训练提供了充足的数据,500对作为验证集在训练过程中配合训练集计算出反演效果最佳的网络参数,另外200作为测试集可以对训练完成的网络进行反演效果测试。
所设定的速度模型参数为:随机生成4~8层起伏层位,速度范围选为2200~4000m/s,随机生成0~1个异常体且位置随机,异常体的速度设定为4300 m/s,随机生成0~2个断层,速度模型的尺寸为:256×128网格点,空间间隔横纵向均为5m,所对应反演区域为1280m×640m。
2 深度学习地震速度反演方法
2.1 基本原理
Hornik[18]提出深度学习神经网络能够通过学习,以一个特定的精度来逼近任何一个连续函数,常规的地震速度反演的整个过程可以看作是:从地震炮记录到速度模型的一个非线性投影,因此从这个角度出发,该问题是可以利用深度学习的方法来处理的。由于地震速度模型和地震炮记录可以图像化显示,通常可以看作为一组二维图像数据,因此选择最擅长处理图像问题的卷积神经网络来作为该方法的核心网络类型。
在这项研究中,相比较利用深度学习代替常规速度反演中的其中一个过程的某个算子(如Araya-Polo[11]提出利用浅层全连接神经网络代替层析速度反演算子,建立起经NMO校正的速度谱体和地震速度模型之间的联系来实现地震速度反演),本文建议利用深层神经网络直接建立地震炮记录和地震速度模型的非线性关系。
如图6所示,该方法的实现包括两个过程。第一个过程是神经网络的训练学习过程,在此过程中,将训练集即N组炮记录和正确的速度模型成对一起输入网络,让神经网络利用大量的正确的匹配好的数据,充分学习地震炮记录与相对应速度模型之间的非线性映射关系。第二个过程为反演过程,在此过程中,可以将地震炮记录输入训练好的网络,反演出未知的地震速度模型,反演的速度模型不包含在训练集中。与传统方法相比,整个过程涉及较少的人工干预,而且不依赖初始速度模型。虽然训练过程需要一定时间,但是一旦网络参数训练完成,网络反演阶段所花时间几乎可以忽略不计。
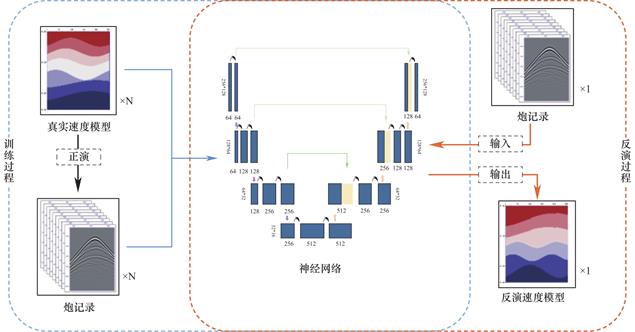
图6 基于深度学习的速度反演方法实现步骤
Fig.6 Implementation steps of velocity inversion method based on deep learning
2.2 网络结构
CNN在本质上是一种输入到输出的映射,它能够通过训练集学习输入数据与输出之间的映射关系,而不需要输入和输出之间的精确的数学表达式,只要用已知的准确数据对卷积网络加以训练,网络就具有输入输出对之间的映射能力。
Ronneberger[19]设计的U-net结构在图像分割领域表现十分出色,该网络左侧为收缩路径(便于提取有用特征)右侧为扩张路径(增强有用信息),类似于数据传输里面的编码-解码结构。本次研究借鉴这一思路设计了自己的网络结构,不同于Ronneberger设计的U-net以灰色或RGB颜色通道读取输入图像,为了更好地匹配地震数据特征,将U-net网络的RGB值对不同应通道,改进为炮记录中不同炮点位置的道集对应不同通道,因此输入的通道数与每个模型的炮记录震源数量相同,该方法可以将多炮地震数据一起输入网络,以提高数据丰富度。参考Yang[14]所设计的FCN型网络架构中存在的问题,为了较好地保存数据的完整性,本文作者改进了网络结构,新设计的网络在输出层利用卷积层将数据变为所需大小而不是将输出数据截断为所需要的尺寸。
网络结构如图7所示,图中每块数据均为三维数据体,为了展示清晰显示为平面图形,例如:左一蓝色长方形为256×128×64的三维体,每个数据体左侧显示数据长宽如:256×128,128×64等,下侧表示通道数如:左侧路径中的通道数为10、64、128、256、512和1024。图中黑色箭头所进行操作包括,利用3×3卷积核进行卷积操作,对数据进行BN操作选用的激活函数为RELU激活函数;紫色箭头所进行操作包括2×2的最大池化操作,橙色箭头表示2×2的逆卷积操作;绿色箭头表示跳跃连接层操作;蓝色箭头表示卷积核为1×1的卷积操作。
该网络以Python实现,使用TensorFlow 和Keras 作为DL支持框架。其中输入数据的地震炮记录震源数量为10,因此网络道数设为10。每炮256道接收,为降低数据体量,加快训练速度,纵向时间采样点个数由原记录1280降采样为128,因此输入层大小为256×128×10。
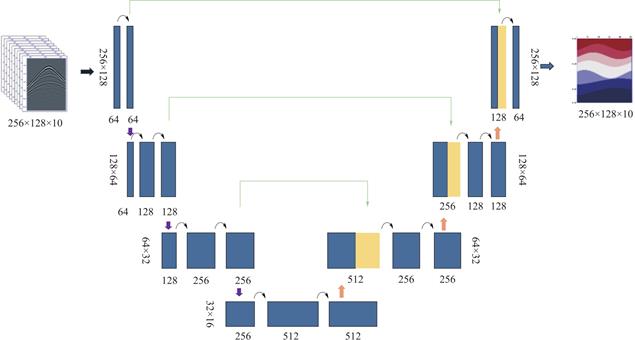
图7 神经网络结构
Fig.7 Neural network structure
3 数据测试及结果分析
3.1 训练超参数设置
恰当的网络参数设置是获得优秀反演结果的先决条件之一,本文根据研究经验选取训练方法和超参数:训练Eopch达到200时停止,Batch Size为32,初始学习率设为0.001,算法上选择均方误差(Mean-Square Error,MSE)法作为损失函数,采用自适应矩估计(Adam)优化算法。在学习率方面采用自适应的逐步下降策略,每经过30次迭代,损失下降低于1×10-6时则自动将学习率缩小10倍,以避免过拟合现象,网络结构见第三章第三节,该网络以Python实现,使用TensorFlow 和Keras 作为DL支持框架。
除去人眼主观对比反演结果外,客观上在反演的速度模型结果评估方面,本文使用图像领域中广泛接受的标准度量,即结构相似性指数(Structural Similarity,SSIM)和峰值信噪比(Peak Signal to Noise Ratio,PSNR)
SSIM(Structural Similarity)不同于传统的客观度量,因为它基于结构比对,而不是图像的误差,因此也更符合地震勘探的需求。其表达式为:
 (6)
(6)
式中, 和
和 分别为个图像中的两个对应窗口位置;
分别为个图像中的两个对应窗口位置; 和
和 为和的平均值;
为和的平均值; 和
和 为和的方差;而
为和的方差;而 是和的协方差。
是和的协方差。
PSNR(Peak Signal to Noise Ratio)中Peak的中文意思是顶点,而Ratio的意思是比率或比列的。整个意思就是到达噪音比率的顶点信号,为了衡量反演结果的品质,PSNR是非常可靠的评价指标,它的单位是dB,其公式如下:
 (7)
(7)
式中,MSE代表两图像之间的均方误差。
3.2 反演结果对比分析
为了验证该方法的优势与不足,本文利用基于深度学习的地震速度反演方法,将其反演结果与传统的地震速度反演方法(层析速度反演和全波形反演)进行比较。这三种方法利用相同的地震炮记录反演速度模型。
速度模型的尺寸为横向1280m,纵向640m,正演炮记录参数为:震源数量为10,震源位置在横向1280m均匀等间隔放置,速度场横纵向采样间隔均为5m,网格大小5m×5m,炮记录的采样时长0.6395s,采样间隔0.5ms,子波类型为雷克子波,主频为25Hz,地震波接收方式为256个检波器全接收。
图8~13分别显示的是正确速度模型,初始速度模型,深度学习的反演结果,Tomography反演结果,FWI反演结果,三种反演方法对比的速度曲线。本次反演过程,深度学习方法反演耗时5s,FWI为1103s,因为Tomography包含人工手动拾取层位过程,无法准确计算整个反演时间,因此不做对比。
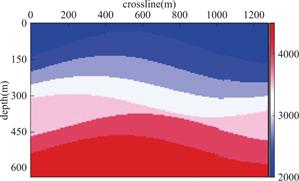
图8 正确速度
Fig.8 Correct velocity
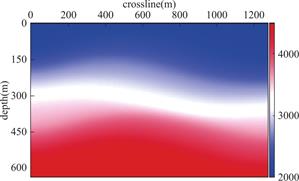
图9 初始速度
Fig.9 Initial velocity
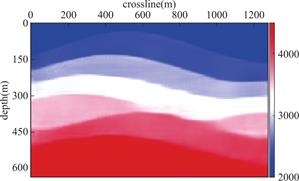
图10 深度学习速度反演
Fig.10 Velocity inversion based on Deep learning
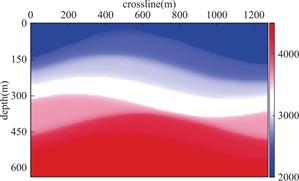
图11 层析速度反演
Fig.11 Tomography velocity inversion
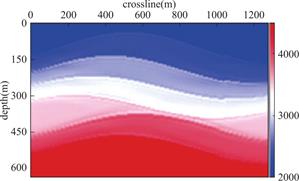
图12 全波形反演
Fig.12 Full Waveform Inversion
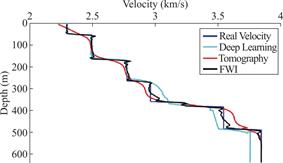
图13 速度曲线
Fig.13 Velocity curve
由图可知,三种方法的反演结果都能较好地反映出地层构造和趋势,全波形反演和层析速度反演在相邻两层位分界面表现良好,深度学习方法稍逊之。速度模型在横向700m纵向350m处出现了三层位置极近的层位,深度学习方法在此位置出现了一定的构造模糊情况。为了定量分析反演结果的准确性,本文利用结构相似性指数度量SSIM(Multiscale Structural Similarity)和峰值信噪比PSNR(Peak Signal to Noise Ratio)对其进行分析。计算出三种方法反演结果分别对应正确速度模型的SSIM和PSNR值后进行排序可得:
SSIM:0.9950(FWI)>0.9928(深度学习)>0.9839(Tomography)
PSNR:38.9511(FWI)>34.9252(深度学习)>32.8619(Tomography)
通过以上指标可以了解到,从模型角度分析深度学习方法的反演结果与常规方法效果相差不大,但反演效率提升明显。
4 结论与建议
通过以上的实验结果可知,本方法在速度反演过程中展现了优秀的能力,但是许多因素会影响其性能如:超参数(学习速率、批量和训练周期等),神经网络的结构,样本集的丰富程度等。其优势体现在,相比较传统的速度反演方法,本方法并不依赖初始速度模型。尽管在训练过程中消耗一定的时间,但在反演过程中所需时间相比于全波形反演降低了三个数量级,因为本方法在反演过程中并不涉及搜寻最优解的迭代过程。
对于全波形反演来说,优质的初始模型直接影响最终的反演结果,因此将本方法的反演结果作为FWI初始速度模型,不失为一个好方法。
与此同时基于深度学习的速度反演方法也存在一定的局限性,该神经网络的反演能力依赖于数据集,若想取得优秀的反演结果,训练的模型应该足够丰富,需要包含类似于反演模型中的结构或特征。同时训练集数量要足够的大,但这又面临一个新的问题,数据量极大的样本集又会造成训练时长加长,对计算机的算力亦是挑战,因此需要达到一个令研究者能接受的平衡。
利益冲突: 作者声明无利益冲突。
[①] *通讯作者 Corresponding author:王非翊,fei.y.wang@stu.pku.edu.cn
收稿日期:2023-04-25; 录用日期:2023-05-20; 发表日期:2023-06-28
参考文献(References)
[1] Hinton G E, Osindero S, Teh Y W. A fast learning algorithm for deep belief nets[J]. Neural computation, 2006, 18(7): 1527-1554.
https://doi.org/10.1162/neco.2006.18.7.1527
[2] LeCun Y, Bengio Y, Hinton G. Deep learning[J]. Nature, 2015, 521(7553): 436-444.
https://doi.org/10.1038/nature14539
[3] Hinton G E, Srivastava N, Krizhevsky A, et al. Improving neural networks by preventing co-adaptation of feature detectors[ J]. arXiv preprint, 2012, arXiv: 1207. 0580.
https://doi.org/10.48550/arXiv.1207.0580
[4] Deng L, Yu D. Deep learning: methods and applications[J]. Foundations & Trends in Signal Processing, 2014, 7(3): 197-387.
http://dx.doi.org/10.1561/2000000039
[5] Wang F, Wu X, and Wang H. Seismic horizon identification using semi-supervised learning with virtual adversarial training[J]. IEEE TGRS, 2022, 60: 1-11.
https://doi.org/10.1109/TGRS.2022.3154439
[6] Bi Z, Wu X, Geng Z, et al. Deep relative geologic time: a deep learning method for simultaneously interpreting 3D seismic horizons and faults[J]. JGR, Solid Earth, 2021, 126(9): 1-24.
https://doi.org/10.1029/2021JB021882
[7] Gao H, Wu X, and Liu G. ChannelSeg3D: channel simulation and deep learning for channel interpretation in 3D seismic images[J]. Geophysics, 2021, 86(4): IM73-IM83.
https://doi.org/10.1190/geo2020-0572.1
[8] Röth G, Tarantola A. Neural networks and inversion of seismic data[J]. Journal of Geophysical Research: Solid Earth, 1994, 99(B4): 6753-6768.
https://doi.org/10.1029/93JB01563
[9] Nath S K, Chakraborty S, Singh S K, et al. Velocity inversion in cross-hole seismic tomography by counterpropagation neural network, genetic algorithm and evolutionary programming techniques[J]. Geophysical Journal International, 1999, 138(1): 108-124.
https://doi.org/10.1046/j.1365-246x.1999.00835.x
[10] Zhu J Y, Park T, Isola P, et al. Unpaired image-to-image translation using cycle-consistent adversarial networks[ A]. Proceedings of the IEEE international conference on computer vision[C]. United States: IEEE, 2017: 2223-2232.
https://doi.org/10.48550/arXiv.1703.10593
[11] Araya-Polo M, Jennings J, Adler A, et al. Deep-learning tomography[J]. The Leading Edge, 2018, 37(1): 58-66.
https://doi.org/10.1190/tle37010058.1
[12] Wu Y, Lin Y, Zhou Z. Inversion Net: Accurate and efficient seismic waveform inversion with convolutional neural networks[M]. United States: Society of Exploration Geophysicists, 2018.
https://doi.org/10.1190/segam2018-2998603.1
[13] Yuan C, Zhang X, Jia X, et al. Time-lapse velocity imaging via deep learning[J]. Geophysical Journal Interna-tional, 2020, 220(2): 1228-1241.
https://doi.org/10.1093/gji/ggz511
[14] Yang F, Ma J. Deep-learning inversion: A next-generation seismic velocity model building method[J]. Geophysics, 2019, 84(4): R583-R599.
https://doi.org/10.1190/geo2018-0249.1
[15] Ren Y, Nie L, Yang S, et al. Building complex seismic velocity models for deep learning inversion[J]. IEEE Access, 2021, 9: 63767-63778.
https://doi.org/10.1109/ACCESS.2021.3051159
[16] Liu B, Yang S, Ren Y, et al. Deep-learning seismic fullwaveform inversion for realistic structural models[J]. Geophysics, 2021, 86(1): R31-R44.
https://doi.org/10.1190/geo2019-0435.1
[17] 朱军. 二维地震正演模拟方法技术研究[D]. 西安: 长安大学, 2007.
[18] Hornik K, Stinchcombe M, White H. Multilayer feedforward networks are universal approximators[J]. Neural Networks, 1989, 2(5): 359-366.
https://doi.org/10.1016/0893-6080(89)90020-8
[19] Ronneberger O, Fischer P, Brox T. U-net: Convolutional networks for biomedical image segmentation[A]// International Conference on Medical image computing and computer-assisted intervention [C]. Germany: Springer, 2015: 234-241.
https://doi.org/10.1007/978-3-319-24574-4_28
Research on Seismic Velocity Inversion Method Based on Deep Learning
XU Wang1, WANG Feiyi2,*, ZHANG Zhiqiang1, LIU Gongli1, DUAN Xinyi1
(1. China National Offshore Oil (China) Corporation, Tianjin Branch, Tianjin 300459, China
2. School of Earth and Space Sciences, Peking University, Beijing 100871, China)
Abstract: Methods for obtaining seismic velocity include offset velocity analysis, tomography velocity inversion and full waveform. inversion, but these methods all share common problems: As the amount of seismic data increases, the time required to process the data to obtain the seismic velocity increases exponentially, and the latter two methods are more dependent on the initial seismic velocity. To address the problems of the above methods, this paper improves a seismic velocity inversion method based on deep learning. At the same time, a method that can generate a large number of velocity models randomly with geological features (undulation layer, faults, anomalies, etc. ) similar to those of real subsurface structures is also proposed. The generated velocity model and fluctuation equation for forward modeling are used to perform. the forward modeling, which allows for the efficient establishment of data set. The basic principle of the improved deep learning inversion method in this paper is as follows: the characteristic information of the training data is extracted by convolution neural network, which is trained with large data to obtain a nonlinear mapping relationship between seismic record and seismic velocity. In the inversion stage, the seismic velocity can be inversed quickly by inputting the seismic records into the trained network. In order to make the network give full play to the advantages of processing seismic data, the authors obtained the dominant network structure by means of numerical simulation, and achieved satisfactory inversion results. Finally, through comparative experiments, this paper verifies the advantages and applicability of the method.
Keywords: Seismic velocity, deep learning, convolutional neural networks, data set, inversion problems
DOI: DOI:10.48014/cpngr.20230425002
Citation: XU Wang, WANG Feiyi, ZHANG zhiqiang, et al. Research on seismic velocity inversion method based on deep learning[J]. Chinese Petroleum and Natural Gas Research, 2023, 2(2): 15-24.
