基于路面激励的车辆参数识别方法
安新好, 侯吉林*
(大连理工大学, 大连 116023)
摘要: 准确的车辆物理参数对车辆振动信息的使用有重要的作用。本文提出一种基于路面激励来识别车辆参数的方法。首先, 根据车辆轮胎与路面位移的接触条件, 推导出车辆各自由度的加速度响应关于路面位移激励的频响函数, 建立了频响函数、车辆加速度响应、路面横截面形状在频域中的关系; 然后根据路面的频率响应建立目标函数, 并使用内点法进行求解来识别车辆物理参数; 最后进行数值仿真, 成功识别出车辆模型的物理参数, 结果表明, 该方法能够对车辆物理参数进行有效识别。
关键词: 车辆, 参数识别, 路面激励, 频域响应, 目标函数
DOI: 10.48014/ems.20220906001
引用格式: 安新好, 侯吉林. 基于路面激励的车辆参数识别方法[J]. 工程材料与结构, 2022, 1(2): 15-23.
文章类型: 研究性论文
收稿日期: 2022-09-06
接收日期: 2022-09-20
出版日期: 2022-12-28
0 引言
随着交通建设的发展,车桥耦合问题得到更广泛的关注,考虑耦合振动情况下的车桥动力响应[1]、桥梁疲劳寿命[2]和桥梁损伤识别[3]等方向都取得了显著的研究进展。在研究这类耦合问题时,把车辆和桥梁看作一个相互影响的系统,就不可避免地需要知道车辆用于计算的物理参数,包括质量、刚度、阻尼等。
车辆是一个复杂的系统,为了方便计算,通常把其简化为弹簧-阻尼模型,进而又可以分为线性系统[4]和非线性系统[5]。非线性系统求解相对复杂,目前在车路/桥耦合的研究中通常使用更为简单的线性系统,包括2自由度四分之一车模型、4自由度半车模型和7自由度全车模型。在本研究中,以半车模型为例来识别其物理参数。
车辆参数识别的方法可以分为模态方法、时域方法和频域方法。
模态方法是在参数识别问题种最广泛使用的方法。该方法首先求得系统的模态参数[6],然后利用模态参数和物理参数之间的关系,识别出物理参数,是一种间接方法。Zheng等[7]用状态变量法识别模态参数,通过附加质量的方法增加方程的数量,进而求解出车辆物理参数。Dong等[8]使用子空间辨识方法识别模态参数,并进一步求得车辆质量惯性参数。Rozyn等[9]使车辆经过随机路面,提取自由衰减响应来求得模态信息,使用最小二乘法计算得到车辆的惯性参数。谢旭等[10]先由小波变换方法得到车辆自振频率,以此作为目标函数,进一步用遗传算法识别出车辆的物理参数。这类方法往往需要确认模态参数的可靠性,一旦模态参数计算不准确或不全面,就会对识别结果产生较大的影响。
另一种方法是直接利用时域响应识别车辆参数。Gaspar等[11]要对许多加速度响应进行数值积分或微分,使用最小二乘法计算得到车辆参数。Jiang等[12]用测量的加速度与推算的加速度之差作为目标函数,使用遗传算法直接计算得到物理参数。Russo等[13]和Cheng等[14]利用时域加速度响应分别使用卡尔曼滤波方法和双扩展卡尔曼滤波方法得到车辆的物理参数。林棻等[15]利用双重扩展的自适应卡尔曼滤波算法得到汽车状态和物理参数。时域的方法可以虽然直接利用测量到的加速度信号识别车辆参数,但是这类方法容易受噪声的影响。
最后,还有比较常用的频域方法。该类方法首先对车辆施加激励,采集激励信号和车辆的响应信号,然后计算得到车辆的频率响应,进而识别出车辆的物理参数。频域的方法能够利用到更丰富的振动信息,提高计算的精度,另外,考虑到车辆振动时的有效信息大都集中在低频段上,所以选择低频段的频域信息作为参数识别的依据不容易受到噪声的影响。Thite[16]使用矩阵求逆的方法并用最小二乘法求解得到车辆参数,需要知道输入激励大小和对应的加速度响应,进行了全尺寸四柱钻机试验,该方法对设备的要求比较苛刻,无法推广普及。Zhao等[17,18]用智能手机作为加速度采集器,使用频域响应作为目标函数,通过遗传算法计算得到车辆参数,该方法需要把减速带的横截面形状认为是施加在车辆轮胎的激励,但是由于轮胎受到冲击挤压变形或者轮胎与减速带并非完全贴合的影响,导致轮胎与路面的接触点的位移不完全是减速带的形状,会对识别结果产生一定的影响。李源等[19]利用车辆经过已知形状的减速,通过计算车辆的加速度频率响应直接计算得到车辆的物理参数,但是其指出当车辆以较快的速度经过减速带时,由于减速带对轮胎的冲击,导致计算的轮胎的频率响应与理论值有较大的差距。以上的方法中,有的方法需要特定的实验室条件,实验条件较为苛刻;有的方法未考虑轮胎受到较大的冲击激励时测量的加速度存在较大误差或者轮胎表现出非线性现象而对结果产生影响,而且轮胎与减速带并非完全贴合,测量的减速带形状不能认为是施加在轮胎上的位移激励。为了解决这些问题,本研究设想车辆经过一段已知不平度的路面,避免车辆受到冲击激励时对轮胎上加速度测量的影响和减速带与轮胎不完全贴合的影响,利用基于车辆频率响应的方法来识别车辆参数。
本文结构:首先,推导车辆加速度响应关于轮胎位移的频响函数;其次,介绍用于识别车辆物理参数的目标函数和用于求解方法。最后,进行数值仿真,讨论了不同路面等级和噪声下的车辆参数识别结果,验证了本文所提方法的有效性。
1 推导车辆与道路接触点的频响函数(FRF)
1.1 车辆模型和动力学方程
本文采用的四自由度半车模型如图1所示,四个自由度 分别表示车身竖向位移、车身俯仰转角、前轮竖向位移和后轮竖向位移。车辆模型可以看作三个部分,分别是车身系统、悬架系统和轮胎,都各自简化为相应的弹簧阻尼模型。车辆模型简化后的物理参数和所规定的符号列入表1。
分别表示车身竖向位移、车身俯仰转角、前轮竖向位移和后轮竖向位移。车辆模型可以看作三个部分,分别是车身系统、悬架系统和轮胎,都各自简化为相应的弹簧阻尼模型。车辆模型简化后的物理参数和所规定的符号列入表1。
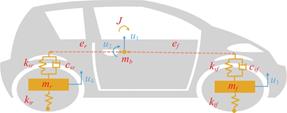
图1 半车模型
Fig.1 Half car model
表1 车辆参数的符号表示
Table 1 Symbols of vehicle parameters
|
符号
|
物理意义
|
|

|
车辆总质量
|
|

|
车身质量
|
|

|
重心到前轮的距离
|
|

|
重心到后轮的距离
|
|

|
车身俯仰转动惯量
|
|

|
前悬架刚度
|
|

|
后悬架刚度
|
|

|
前悬架阻尼系数
|
|

|
后悬架阻尼系数
|
|

|
前轮质量
|
|

|
后轮质量
|
|

|
前轮刚度
|
|

|
后轮刚度
|
对车辆模型进行动力学分析,把车辆的振动微分方程写成矩阵形式:
 (1)
(1)
式中, ,
, 和
和 是车辆所有自由度的响应矩阵,分别关于位移、速度和加速度。
是车辆所有自由度的响应矩阵,分别关于位移、速度和加速度。 、
、 、
、 分别是车辆系统的质量矩阵、阻尼矩阵和刚度矩阵,它们由表1中的车辆物理参数计算得到,文献[20]给出了具体的推导方法和表达形式,本文不再赘述。
分别是车辆系统的质量矩阵、阻尼矩阵和刚度矩阵,它们由表1中的车辆物理参数计算得到,文献[20]给出了具体的推导方法和表达形式,本文不再赘述。 是车辆受到的路面激励,它由轮胎刚度矩阵
是车辆受到的路面激励,它由轮胎刚度矩阵 、轮胎和路面接触点的位移矩阵
、轮胎和路面接触点的位移矩阵 共同计算得到。
共同计算得到。
对于一个给定的车辆,其重心位置可以直接通过测量的方法得到。具体做法是:直接测量车辆前后轮之间的距离 、整车车重以及在水平静止状态下的前后轮位置的重力
、整车车重以及在水平静止状态下的前后轮位置的重力 和
和 ,通过式(2)计算得到和。剩余10个物理参数不能通过直接测量的方法得到,本研究的目的就是要通过车辆的振动信息识别其值。
,通过式(2)计算得到和。剩余10个物理参数不能通过直接测量的方法得到,本研究的目的就是要通过车辆的振动信息识别其值。
 (2)
(2)
1.2 车辆频响函数
对振动微分方程式(1)两边同时进行傅里叶变换,可以得到在某一频率 下的频域平衡方程:
下的频域平衡方程:
 (3)
(3)
整理式(3)得到车辆所有自由度的位移频域响应 :
:
 (4)
(4)
由于加速度信号容易利用传感器测量,而且有较高的精度保障,所以选择观测车辆的加速度信号。当某些自由度对应的响应不方便采集或者数据缺失时,可以用观测矩阵 表示只利用部分传感器测量得到的加速度响应信号。车辆的加速度的频域响应表达式为:
表示只利用部分传感器测量得到的加速度响应信号。车辆的加速度的频域响应表达式为:
 (5)
(5)
车辆以特定的速度行驶时,用 表示前后轮经过路面的时间差:
表示前后轮经过路面的时间差: ,其值是固定的。则前后轮的频域响应可以互相表示为:
,其值是固定的。则前后轮的频域响应可以互相表示为:
 (6)
(6)
最终车辆响应和前轮接触点处的位移激励之间的关系满足表达式:
 (7)
(7)
前轮接触点位移和车辆加速度响应之间的频响函数表示为:
 (8)
(8)
1.3 估计路面的频域响应
上节推导出车辆加速度响应关于路面不平度的频响函数,可以进一步计算得到减速带的频域响应:
 (9)
(9)
式中, 代表广义逆,可以用最小二乘法表示为
代表广义逆,可以用最小二乘法表示为 ,右上角的符号“H”表示共轭转置。
,右上角的符号“H”表示共轭转置。
2 车辆参数估计
2.1 建立目标函数
假设车辆各个物理参数的初始值 如式(10)所示,定义
如式(10)所示,定义 是与相同维度的向量,用来修正中对应位置的物理参数,称为修正因子,如式(11)所示。由车辆响应计算得到的前轮与地面接触点位移的频谱可以表示为
是与相同维度的向量,用来修正中对应位置的物理参数,称为修正因子,如式(11)所示。由车辆响应计算得到的前轮与地面接触点位移的频谱可以表示为 ,与前轮接触点的路面不平度经傅里叶变换得到的频域响应表示为
,与前轮接触点的路面不平度经傅里叶变换得到的频域响应表示为 ,以此为基础,建立的目标函数见式(12),其中,
,以此为基础,建立的目标函数见式(12),其中, 表示目标函数中用于计算的频率下限,
表示目标函数中用于计算的频率下限, 表示使用的频率的上限,由于目标函数中“计算得到的前轮接触点位移的频域响应”
表示使用的频率的上限,由于目标函数中“计算得到的前轮接触点位移的频域响应” 是由测得的车辆的加速度响应数据计算得到的,而车辆的固有频率范围是1.5~20Hz,超出这个范围的受测得的车辆加速度响应信息的影响可能存在较大的误差,所以用于优化的区间选择在该区间内部,取为1.5~20Hz。目标函数
是由测得的车辆的加速度响应数据计算得到的,而车辆的固有频率范围是1.5~20Hz,超出这个范围的受测得的车辆加速度响应信息的影响可能存在较大的误差,所以用于优化的区间选择在该区间内部,取为1.5~20Hz。目标函数 的含义为:当修正因子符合车辆真实的物理参数时,由物理参数和车辆响应计算得到的路面频谱与真实的路面频谱相符。
的含义为:当修正因子符合车辆真实的物理参数时,由物理参数和车辆响应计算得到的路面频谱与真实的路面频谱相符。
 (10)
(10)
 (11)
(11)
 (12)
(12)
2.2 目标函数的优化
目标函数(12)可以选择不同的优化方法求解,智能优化算法是目前比较流行的选择,但是智能优化算法大多属于启发性算法,迭代过程有一定的随机性,最后的收敛往往较慢。商用软件MATLAB中内置的fmincon函数可以调用内点法、信赖域反射算法、序列二次规划算法等多种优化算法,对约束优化或非约束优化问题都有比较高的求解效率。内点法[21]又叫作障碍函数法,是一种经典的求解非线性凸规划的优化方法,通过设置惩罚项来保持迭代点始终处于可行域的范围内部,从而逐步搜索达到最优解。对于本研究所提出的目标函数,采用fmincon函数中的内点法进行求解。优化求解时,考虑到现实情况中车辆总质量可以直接称出,车身质量和前后轮质量的综合,是一个不变的常数,所以把其看作一个等式约束条件。
3 数值仿真
3.1 车辆物理参数
用于数值仿真的假设的车辆所有物理参数和其具体值如表2所示,表中前3个参数作为已知条件,可以直接测量得到,后面10个参数需要使用本文提出的方法进行识别。
表2 车辆参数的取值
Table 2 Values of vehicle parameters
|
符号
|
单位
|
假设的真值
|
假设的初值
|
|

|
kg
|
1160
|
1160
|
|
|
m
|
1.5
|
1.5
|
|
|
m
|
1.5
|
1.5
|
|
|
kg
|
1000
|
960
|
|
|
kg·m2
|
4000
|
6000
|
|
|
kg
|
80
|
100
|
|
|
kg
|
80
|
100
|
|
|
N·s /m
|
4000
|
3000
|
|
|
N·s /m
|
4000
|
3000
|
|
|
N/m
|
200000
|
250000
|
|
|
N/m
|
200000
|
250000
|
|
|
N/m
|
300000
|
250000
|
|
|
N/m
|
300000
|
250000
|
3.2 路面形状的模拟
给定一段已知不平度的路面,用于激励车辆产生响应。在现实情况中,可以利用车载激光平整度仪来测量路面的不平度。本研究采用三角级数方法模拟路面的不平度,该方法用若干个正弦波叠加来表示不同粗糙度的路面[22],具体表达式见式(13)。空间上的横断面轮廓如图2所示。
 (13)
(13)
式中: 表示三角级数的系数,
表示三角级数的系数, ;
; 是用于控制随机生成路面的参数,在
是用于控制随机生成路面的参数,在 内均匀分布;
内均匀分布; 表示正弦函数的总个数;
表示正弦函数的总个数; 表示路面不平度的系数,其取值决定了道路的不平度等级;
表示路面不平度的系数,其取值决定了道路的不平度等级; 表示路面位移功率谱,其表达式为
表示路面位移功率谱,其表达式为 ;
; 表示参考空间频率,取为固定值0.1m-1;
表示参考空间频率,取为固定值0.1m-1; 表示空间频率,计算方法为
表示空间频率,计算方法为 ,其中
,其中 ,
, 和
和 分别表示路面空间频率的上限和下限。本文考虑路面等级为B级,不平度系数
分别表示路面空间频率的上限和下限。本文考虑路面等级为B级,不平度系数 ,空间频率
,空间频率 、
、 由上述方法和参数计算出的路面不平度如图2所示,路面与前轮接触点位移的频谱如图3所示。
由上述方法和参数计算出的路面不平度如图2所示,路面与前轮接触点位移的频谱如图3所示。
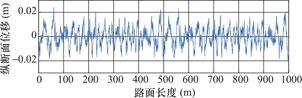
图2 路面横断面形状
Fig.2 Road cross-sectional shape
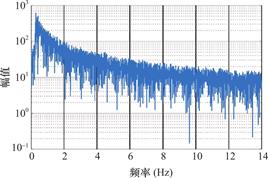
图3 路面横断面频谱
Fig.3 Road cross-sectional spectrum
3.3 车辆响应仿真
假设采样频率为2000Hz,使用newmark-β方法计算车辆的响应,并在响应中加入5%的高斯白噪声。高斯白噪声的计算过程:
 (14)
(14)
式中,y表示测量得到的时域加速度信号(表示为行向量); 表示附加噪声后的信号;
表示附加噪声后的信号; 表示白噪声的百分比,此例中取为5%;s表示加速度信号的标准差,N表示信号的点数;
表示白噪声的百分比,此例中取为5%;s表示加速度信号的标准差,N表示信号的点数; 表示随机向量,其维度与加速度信号
表示随机向量,其维度与加速度信号 相同,内部的元素是随机的满足标准正态分布的值。
相同,内部的元素是随机的满足标准正态分布的值。
考虑到在实际情况中,车身的转角不方便测量,所以该响应不进行测量,车体的竖向加速度更方便采集而且能保证有较高的测量精度,所以假设传感器只采集车身竖向加速度、前轮竖向加速度和后轮竖向加速度,对应的观测矩阵应设置为:
加速度传感器采集得到的车身竖向加速度响应和前轮竖向加速度响应分别如图4和图5所示,其各自对应的加速度频域响应如图6和图7所示。
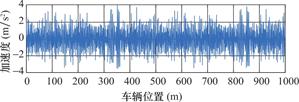
图4 车身加速度响应
Fig.4 Vehicle body acceleration response

图5 前轮加速度响应
Fig.5 Front wheel acceleration response
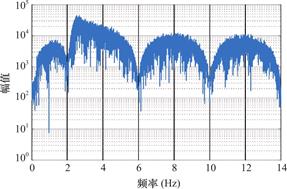
图6 车身加速度频谱
Fig.6 Body acceleration spectrum
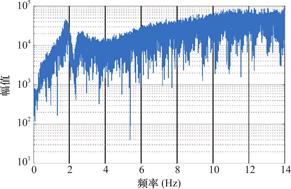
图7 前轮加速度频谱
Fig.7 Front wheel acceleration spectrum
4 识别结果分析
利用测量得到的车辆加速度响应数据和路面的不平度数据识别出的车辆物理参数列入表3,其中误差的计算方法见式(15):
误差= ×100%(15)
×100%(15)
表3 车辆参数的识别结果和误差
Table 3 Identification results and errors of vehicle parameters
|
符号
|
单位
|
真值
|
识别值
|
误差
|
|
|
kg
|
1000
|
1001
|
0.1%
|
|
|
kg·m2
|
4000
|
3947
|
1.3%
|
|
|
kg
|
80
|
84
|
4.5%
|
|
|
kg
|
80
|
75
|
6.1%
|
|
|
N·s /m
|
4000
|
4638
|
15.9%
|
|
|
N·s /m
|
4000
|
3465
|
13.4%
|
|
|
N/m
|
200000
|
19100
|
0.4%
|
|
|
N/m
|
200000
|
193725
|
3.1%
|
|
|
N/m
|
300000
|
274275
|
8.6%
|
|
|
N/m
|
300000
|
313075
|
4.4%
|
通过表3中的识别结果可知,对大部分车辆参数的识别结果都比计较准确,除了悬架阻尼和的误差在15%左右,其他参数的误差都在10%以内,该识别结果的精度能够满足车辆参数在使用时的要求,表明该方法具有一定的可行性。
4.1 不同路面等级的识别结果
为了研究不同平整度的路面对识别结果的影响,分别取16 、64和256来模拟A、B、C三种等级的路面,生成的车辆加速度响应数据附加5%高斯白噪声,车辆各参数的识别结果如图8所示。观察图中的结果可知,当路面等级是A级时,识别的各参数的误差都在15%以内,轮胎质量和悬架阻尼的误差相对较大,在10%~15%,其余参数的误差都在10%以内,这可能是因为轮胎和阻尼的量级相对刚度系数和转动惯量来说比较小,目标函数对其灵敏度比较低,所以导致识别的误差相对较大;当路面等级是C级时,除轮胎质量误差在10%~15%,其余参数的误差都在10%以内。综合这三种路面等级下的识别结果可知,轮胎质量和悬架阻尼的识别结果相对误差较大,但精度仍能满足要求,其余参数的误差都在10%以内,能够稳定识别,可以得出结论:不同等级的路面不影响车辆物理参数的识别结果,因而在实际试验时可以认为路面不平度对结果的影响较小。
、64和256来模拟A、B、C三种等级的路面,生成的车辆加速度响应数据附加5%高斯白噪声,车辆各参数的识别结果如图8所示。观察图中的结果可知,当路面等级是A级时,识别的各参数的误差都在15%以内,轮胎质量和悬架阻尼的误差相对较大,在10%~15%,其余参数的误差都在10%以内,这可能是因为轮胎和阻尼的量级相对刚度系数和转动惯量来说比较小,目标函数对其灵敏度比较低,所以导致识别的误差相对较大;当路面等级是C级时,除轮胎质量误差在10%~15%,其余参数的误差都在10%以内。综合这三种路面等级下的识别结果可知,轮胎质量和悬架阻尼的识别结果相对误差较大,但精度仍能满足要求,其余参数的误差都在10%以内,能够稳定识别,可以得出结论:不同等级的路面不影响车辆物理参数的识别结果,因而在实际试验时可以认为路面不平度对结果的影响较小。
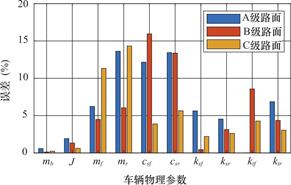
图8 不同路面等级时的识别结果
Fig.8 Identification results at different pavement service abilities
4.2 噪声的影响
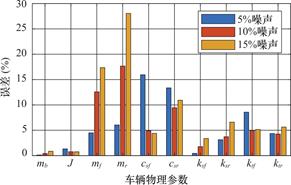
图9 不同噪声条件下车辆参数误差估计
Fig.9 Vehicle parameter error estimated under different noise levels
在实际试验中,传感器采集到的加速度信号难免会有噪声,本节讨论在不同噪声情况下车辆物理参数的识别情况。在速度为12m/s的情况下,newmark-β法得到的车辆加速度响应信号分别增加5%、10%和15%的高斯白噪声,识别出的车辆物理参数与真实值之间的误差如图9所示。从图中可以看出,车身质量、俯仰惯性矩和刚度的识别结果受噪声的影响较小,三种噪声情况下识别的误差都在10%以内。但是轮胎质量的识别结果受噪声影响严重,误差变化的总体趋势是随着噪声的增大而增大,在15%噪声情况下,最大的误差达到了25%以上,这可能是因为轮胎质量量级相对来说较小,容易受到噪声的影响所导致的。所以,当实际传感器采集到的加速度信号误差在10%以内时,所提的方法直接使用实测的加速度响应就可以识别得到比较精确的车辆物理参数。
5 结论
本文提出了一种已知路面不平度来估算车辆物理参数的方法。通过本文的理论公式推导和数值仿真的结果,可以得到以下结论:
(1)该方法利用车辆以一定速度经过一段已知不平度的路面时的加速度响应来识别车辆的物理参数。以车辆前轮接触点的位移的频域响应作为目标函数,通过内点法进行求解从而识别物理参数的值。数值仿真的结果证明了路面不平度的等级可以是任意的,在实际应用时只需要保证车辆匀速行驶即可。
(2)提出的频域识别车辆物理参数的方法即使在一定噪声水平下,也能识别得到比较准确的物理参数。当噪声较大时,所识别的轮胎质量有较大的偏差而且不稳定,可能是因为其量级较小灵敏度低引起,其高噪声下的识别方法有待进一步研究,除此之外,其余物理参数即使在高噪声下仍能有较高的精度。
利益冲突: 作者声明无利益冲突。
[①] *通讯作者 Corresponding author:侯吉林,houjilin@dlut.edu.cn
收稿日期:2022-09-06; 录用日期:2022-09-20; 发表日期:2022-12-28
资助项目:本项研究得到了国家自然科学基金项目(资助号51878118)的资助。
参考文献(References)
[1] 乔宏, 夏禾, 杜宪亭. 基于Duhamel积分的车桥耦合动力分析方法[J]. 西南交通大学学报, 2014, 49(05): 766-771.
https: //doi. org/10. 3969/j. issn. 0258-2724. 2014. 05. 004
[2] 朱劲松, 香超, 祁海东. 考虑车桥耦合效应的大跨悬索桥钢-混组合梁疲劳损伤评估[J]. 振动与冲击, 2021, 40(05): 218-229.
https: //doi. org/10. 13465/j. cnki. jvs. 2021. 05. 029
[3] 张予东, 马春艳, 陈鹏一. 基于车桥耦合振动的桥梁结构损伤识别[J]. 公路工程, 2021, 46(02): 60-64.
https: //doi. org/10. 19782/j. cnki. 1674-0610. 2021. 02. 010
[4] OBRIEN E J, CANTERO D, ENRIGHT B, et al. Characteristic Dynamic Increment for extreme traffic loading events on short and medium span highway bridges[J]. Engineering Structures, 2010, 32(12): 3827-3835.
https: //doi. org/10. 1016/j. engstruct. 2010. 08. 018
[5] ALLAMRAJU K V. Nonlinear behavior of quarter locomotive suspension system[J]. Materials today : proceedings, 2018, 5(2): 4887-4892.
https: //doi. org/10. 1016/j. matpr. 2017. 12. 065
[6] 曹树谦, 等. 振动结构模态分析[M]. 天津: 天津大学出版社, 2014.
[7] ZHENG M, PENG P, ZHANG B, et al. A new physical parameter identification method for two-axis on-road vehicles: Simulation and experiment[J]. Shock and Vibration, 2015, 2015: 1-9.
https: //doi. org/10. 1155/2015/191050
[8] DONG G, CHEN J, ZHANG N. Investigation into onroad vehicle parameter identification based on subspace methods[J]. Journal of Sound and Vibration, 2014, 333(24): 6760-6779.
https: //doi. org/10. 1016/j. jsv. 2014. 07. 012
[9] ROZYN M, ZHANG N. A method for estimation of vehicle inertial parameters[J]. Vehicle system dynamics, 2010, 48(5): 547-565.
https: //doi. org/10. 1080/00423110902939863
[10] 谢旭, 李季隆, 赵俊亮, 等. 基于遗传算法的车辆参数识别方法[J]. 浙江大学学报(工学版), 2010, 44(09): 1818-1824.
[11] GASPAR P, SZABO Z, BOKOR J. Parameter identification of a suspension system and road disturbance estimation[ J]. International Journal of Vehicle Systems Modeling and Testing, 2007, 2(2): 128-137.
https: //doi. org/10. 1504/IJVSMT. 2007. 013891
[12] JIANG R J, AU F T K, CHEUNG Y K. Identification of vehicles moving on continuous bridges with rough surface[J]. Journal of Sound and Vibration, 2004, 274(3-5): 1045-1063.
https: //doi. org/10. 1016/S0022-460X(03)00664-3
[13] RUSSO M, RUSSO R, VOLPE A. Car parameters identification by handling manoeuvres[J]. Vehicle system dynamics, 2000, 34(6): 423-436.
https: //doi. org/10. 1076/vesd. 34. 6. 423. 2053
[14] CHENG C, CEBON D. Parameter and state estimation for articulated heavy vehicles[J]. Vehicle System Dy- namics, 2011, 49(1-2): 399-418.
https: //doi. org/10. 1080/00423110903406656
[15] 林棻, 赵又群. 基于双重扩展自适应卡尔曼滤波的汽车状态和参数估计[J]. 中国机械工程, 2009, 20(06): 750-755.
https: //doi. org/10. 3321/j. issn: 1004-132X. 2009. 06. 026
[16] THITE A N, BANVIDI S, IBICEK T, et al. Suspension parameter estimation in the frequency domain using a matrix inversion approach[J]. Vehicle system dynamics, 2011, 49(12): 1803-1822.
https: //doi. org/10. 1080/00423114. 2010. 544319
[17] ZHAO B, NAGAYAMA T. IRI estimation by the frequency domain analysis of vehicle dynamic responses [J]. Procedia Engineering, 2017, 188: 9-16.
https: //doi. org/10. 1016/j. proeng. 2017. 04. 451
[18] ZHAO B, NAGAYAMA T, TOYODA M, et al. Vehicle Model calibration in the frequency domain and its application to large-scale IRI estimation[J]. Journal of disaster research, 2017, 12(3): 446-455.
https: //doi. org/10. 20965/jdr. 2017. p0446
[19] 李源. 基于卡尔曼滤波算法的路面平整度识别方法研究[D]. 哈尔滨: 哈尔滨工业大学, 2021.
[20] ZHANG Q, HOU J, DUAN Z, et al. Road roughness estimation based on the vehicle frequency response function[J]. Actuators, 2021, 10(5): 89.
https: //doi. org/10. 3390/act10050089
[21] 陈宝林. 最优化理论与算法[M]. 北京: 清华大学出版社, 2005.
[22] 梁新成, 张军, 徐瑞. 三角级数法的路面重构仿真研究 [J]. 汽车工程学报, 2011, 1(5): 442-447.
https: //doi. org/10. 3969/j. issn. 2095-1469. 2011. 05. 002
Vehicle Parameter Identification Method Based on Road Excitation
AN Xinhao, HOU Jilin*
(Dalian University of Technology, Dalian 116023, China)
Abstract: Accurate vehicle physical parameters play an important role in the use of vehicle vibration information. A method to identify vehicle parameters based on road excitation is proposed. Firstly, the frequency response function of vehicle acceleration response with respect to road displacement excitation is derived based on the contact conditions for the displacement between vehicle tires and road, and the relationship between frequency response function, vehicle acceleration response and road cross-section shape in the frequency domain is established. Then, the objective function is established using the frequency response of the road surface, and the physical parameters of the vehicle are identified using the interior point method. Finally, numerical simulation is performed and the physical parameters of the vehicle model are successfully identified. The results show that the method can effectively identify the physical parameters of vehicles.
Keywords: Vehicle, parameter identification, road excitation, frequency domain response, objective function
DOI: 10.48014/ems.20220906001
Citation: AN Xinhao, HOU Jilin. Vehicle parameter identification method based on road excitation[J]. Engineering Materials and Structures, 2022, 1(2): 15-23.
