基于图像处理的竹材定长截断系统研究
苏坚毅, 王振忠*, 陈永明
(厦门大学机电工程系, 厦门 361005)
摘要: 针对竹材定长截断设备自动化程度低的现状, 提出一种基于软件运动控制的竹材截断控制方案, 并应用图像处理技术集成设计了竹节识别系统, 使竹材加工过程中能有效避开竹节。首先, 经灰度处理、滤波去噪, 获得平滑后的图像; 其次, 利用开运算和膨胀等形态学操作, 提取竖线特征; 最后, 通过对直线边缘检测得到的线段进行优化筛选, 计算判断预截断区域竹节是否存在。实验结果表明, 竹节识别准确率可达到90%, 识别效率高, 可满足竹材定长生产需求。
关键词: 竹节识别, 机器视觉, 智能化, 集成化
DOI: 10.48014/fcmet.20220422001
引用格式: 苏坚毅,王振忠,陈永明. 基于图像处理的竹材定长截断系统研究[J]. 中国机械工程技 术学报,2022,1(1):1-7.
文章类型: 研究性论文
收稿日期: 2022-04-22
接收日期: 2022-06-19
出版日期: 2022-06-28
0 引言
中国是世界竹产业大国,竹资源量和种类均居世界首位,有着悠久的竹子培育历史[1]。我国竹产业伴随着工业水平的进步而发展,产品种类日益丰富,国际贸易稳步提升,对社会经济发展与生态建设做出了巨大贡献。但是竹产业仍面临着自动化程度低、劳动力成本高的问题,迫切需要提高竹材采收与加工制造的装备自动化与智能化水平[2]。
机器视觉技术是现代工业发展的基础技术之一,已广泛应用于智能制造技术领域[3]。在智能驾驶领域,基于机器视觉提取车道线和检测与跟踪交通目标的方式,提高了汽车对环境的感知能力,使得无人驾驶在未来成为可能[4];在工厂自动化行业中,机器视觉引导机器人作业、替代人工质检等手段[5,6]的普遍应用,加快了制造业产业升级的步伐;在农业生产中,机器视觉为病虫草害的识别监测与果蔬的定位采摘等提供了全新的解决办法[7]。同样地,对于竹材生产工序繁杂的竹产业,机器视觉的应用将有利于提高竹材生产全产线自动化程度,增强竹产业竞争力。
定长横截是竹材生产的第一道工序,即把竹材按产品规格等长度锯断[8]。锯竹时,锯片若未避开竹节,刀具进给困难,易造成锯片损坏和竹筒壁破碎,加工废品率高。因此竹节识别是提高定长横截工序自动化程度的关键技术。彭亮等[9]发明了一种锯竹设备,通过将探测杆伸入原竹内腔,利用限位块触发行程开关信号来检测定长段内有无竹节,却无法识别并避开竹节;沈冯铮[10]利用竹节与竹壁高度差的几何特征来判断预截断处是否存在竹节,使竹节识别机构底部与竹壁接触,其内部直线位移传感器将测得竹节与竹壁高度差,但该方法较非接触式检测精度低。
本文针对竹材定长截断工序,提出一种竹材截断系统方案,并且基于机器视觉图像处理方法,设计集成了竹节识别系统,提高锯竹设备智能化水平的同时极大地降低了研发成本。
1 系统总体方案
国内目前的竹材截断方法仍以工人手工拾取原料,然后操作切割机构切断为主,如图1所示。竹材加工过程中,存在工人劳动强度大且所处生产环境较差、企业生产成本高等问题。因此,要求竹材定长截断设备具有高可靠性、低硬件成本与良好自动化生产能力。

图1 竹材定长截断
Fig.1 Fixed-length truncation of bamboo
竹材定长截断系统围绕工控机搭建,将切割机构、I/O(Input/Output)模块、传送机构、图像采集模块以及竹节识别系统等资源有机结合起来,图2为其系统框图。工控机搭载运动控制软件WMX3,所有的实时伺服运动均由工控机CPU代替运动控制卡或运动控制器完成,工控机与切割机构、传送机构的伺服驱动系统以及I/O模块的通信均基于EtherCAT总线完成。软件运动控制代替硬件的方式降低了控制成本,并且提高了系统的柔性及可拓展性。I/O模块作为中间辅助模块,接收竹节识别系统图像处理结果并发送给工控机。
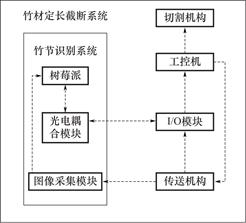
图2 竹材定长截断系统
Fig.2 Fixed-length truncation system of bamboo
竹节识别系统为竹材定长截断系统重要子模块,集成了树莓派、光电耦合模块与图像采集模块,如图3、图4所示。树莓派是一款微型电脑,图像采集模块为CMOS相机,像素大小为1920×1080。其中树莓派与图像采集模块采用USB通信,并通过光电耦合模块使得其GPIO(general-purpose input/output,通用输入/输出)口电平能与其他模块完成信号交互。竹节识别系统接收图像采集模块采集的原竹图像,对原竹图像处理分析后发送识别结果。
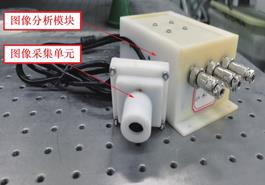
图3 竹节识别系统
Fig.3 Bamboo joint identification system

图4 图像分析模块组成
Fig.4 Composition of image analysis module
竹节识别的图像处理程序是基于OpenCv4.1.0开源库开发的,并且在树莓派Raspbian操作系统上运行。自动化工作流程为:竹竿运输到可截断位置后,竹节识别系统接收传送机构红外光电传感器信号,然后图像采集模块采集竹竿图像传输给树莓派进行分析处理,最后竹节识别系统通过I/O信号将竹节是否存在的判定结果发送给工控机,由工控机发送控制指令给切割机构与传送机构执行相应动作,具体流程如图5所示。
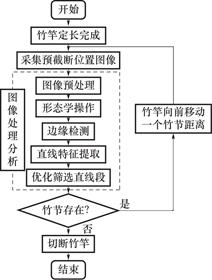
图5 竹材定长截断工作流程
Fig.5 Workflow of bamboo fixed-length truncation
2 图像分析处理
2.1 竹对象分析
竹竿多为直立姿态,分为节与节间两部分。节间为中空,呈圆筒形;节处有横隔板,由秆环、箨环、节内组成[11]。竹竿的颜色、秆茎、节间长等性状因竹材种类不同而表现差异,节处相对节间区别明显,表现为颜色具有较大差异,但采伐过程中原竹多有磨损,颜色差异减弱而无法作为识别特征;竹节形状为线性带状,与竹竿近似垂直,可作为竹节定位特征。
2.2 图像预处理
图像预处理是竹节特征提取的首要步骤,处理效果将影响后续竹节识别算法的检测。首先,为减少图像处理计算量,将采集得到的原始图像进行灰度化处理,去除图像颜色信息并保留图像的特征信息。其次,由于图像在采集过程中会产生随机分布的噪声点,需要通过滤波将噪声去除,并且尽量保留图像信息[12]。竹节预处理图像如图6~图8所示。

图6 原图
Fig.6 Original image

图7 灰度图
Fig.7 Grayscale image

图8 滤波图
Fig.8 Filtering image
2.3 形态学操作
形态学图像处理指对图像的形态特征进行处理的技术,通过特定阵列的结构元对原始图像遍历操作,从而提取出图像分析和目标识别所需的形态特征[13]。常见的形态学操作包括膨胀与腐蚀、开运算与闭运算,其数学基础理论是集合论。设 是原始图像,
是原始图像, 是一个结构元,则当
是一个结构元,则当 的原点与
的原点与 重合时,膨胀表示将结构元与原始图像重合区域最大值设为点的像素值,其数学表达式为:
重合时,膨胀表示将结构元与原始图像重合区域最大值设为点的像素值,其数学表达式为:
 (1)
(1)
腐蚀表示将结构元与原始图像重合区域最小值设为原点的像素值,表达式为:
 (2)
(2)
开运算表示为先腐蚀,再膨胀;闭运算为先膨胀,再腐蚀。
本文对预处理完后的图像进行开运算处理来平滑轮廓,去除噪声的同时断开图像中一些竹竿细小纹理所映射产生的细窄连接。开运算操作中将结构元定义为一条竖线,用以筛选出图像中的竖线,如图9所示;之后再对其进行膨胀操作,增加竖线的连续性,如图10所示。

图9 开运算图
Fig.9 Opening operation image

图10 膨胀操作图
Fig.10 Dilation operation image
2.4 竹节定位
边缘检测是通过识别图像中灰度变化最明显的部分,即局部不连续特征来组成边缘。边缘检测对于目标识别具有重要意义,剔除了大量的无效数据,仅保留图像关键特征信息。常用的边缘检测算子有很多,Canny算子能够检测到弱边缘,因此本文选用Canny算子来寻找图像边缘,如图11所示。
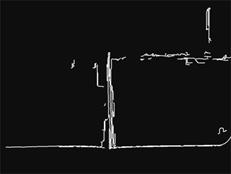
图11 边缘提取图
Fig.11 Edge Extraction Image
边缘检测完成后得到了轮廓像素点,需要通过这些边缘点做线段检测,得到线段的长度、位置等信息。霍夫变换由Paul Hough于1962年首次提出,可用于检测图像中的直线,后来拓展到其他形状物体的识别[14]。本文使用概率式霍夫变换识别直线特征,并且记录下识别线段的两端坐标。
由于竹竿采伐过程中磨损或磕碰可能产生划痕,将图像处理得出的直线全部作为竹节特征易产生误识别,因此需要对直线检测结果进行优化筛选。定义霍夫变换识别直线集合为 ,第
,第 段直线段表示为
段直线段表示为 ,该线段第一个端点坐标表示为
,该线段第一个端点坐标表示为 ,第二个端点坐标表示为
,第二个端点坐标表示为 ,切割机构预截断区域为
,切割机构预截断区域为 ,最短线段阈值为
,最短线段阈值为 ,本批次竹节最小线段和阈值
,本批次竹节最小线段和阈值 。首先,过滤掉非截断区域外区域线段,并且由于过短的直线段常为干扰线段,仅保留大于最短线段阈值线段。其次,竹节特征明显垂直于竹竿,应剔除斜率角度绝对值小于80°的直线段。则有效识别线段满足式(3)、式(4)、式(5)或式(6):
。首先,过滤掉非截断区域外区域线段,并且由于过短的直线段常为干扰线段,仅保留大于最短线段阈值线段。其次,竹节特征明显垂直于竹竿,应剔除斜率角度绝对值小于80°的直线段。则有效识别线段满足式(3)、式(4)、式(5)或式(6):
 (3)
(3)
 (4)
(4)
 (5)
(5)
 (6)
(6)
最后,计算有效长度总长,当满足式(7),判定当前切割机构预截断区域存在竹节:
 (7)
(7)
3 实验结果
本文中切割机构与图像采集模块位置在系统中相对固定,设预截断区间为15mm。图像处理过程中的长度以像素为基本单位,经过标定,此次单位像素代表实际长度为0.2mm。采集图像像素为960×720,Canny算子的阈值为(50,150),概率霍夫变换阈值为80,最短线段阈值为为50,最小线段和阈值为300。
对于无竹节照片,预截断区域无检测出的线段,或者由于线段过短、线段总长度小于最小线段和阈值而被判定为无竹节。为验证所述算法竹节识别效果,随机选取30组竹节照片对其进行图像处理,预截断区域有效线段总长与实验次数关系如图12所示。
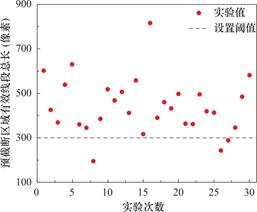
图12 图像处理实验结果
Fig.12 Experiment results of image processing
实验结果表明,由于个别竹节磨损较为严重,导致识别效果不佳,但30组中有27组预截断区域有效线段总长超过设置阈值,竹节识别率可达到90%。该图像处理程序竹节识别率较高,可取代人工判别竹节位置,具有大批量推广的可行性。
4 结语
针对竹材定长截断工序需要人工判断竹节位置的问题,本文基于软件运动控制和机器视觉技术提出一种竹材定长截断设备的控制系统,设计并集成了竹节识别系统。通过在树莓派上移植OpenCv开源库源码,以光电传感器信号触发中断采集处理图片的方式,开发了图像处理程序。将竹节近似垂直竹竿的特点作为识别特征,经过灰度处理、滤波操作,对图像进行形态学处理,提取竖线特征,接着对边缘进行检测,使用霍夫变换获取线段数据,最后利用经过优化修正后的线段数据判断该区域是否存在竹节。经实验验证,该竹材定长截断系统能够自动避开竹节,满足竹材定长加工需求。
利益冲突: 作者声明无利益冲突。
[①] *通讯作者 Corresponding author:王振忠,wangzhenzhong@xmu.edu.cn
收稿日期:2022-04-22; 录用日期:2022-06-19; 发表日期:2022-06-28
参考文献(References)
[1] 崔媛媛,苏文会,张纪元,等.中国竹产业在乡村振兴中 的发展对策[J].世界竹藤通讯,2021,19(03):88-91.
https://dx.doi.org/10.12168/sjzttx.2021.03.016.
[2] 王戈,陈复明,程海涛,等.中国竹产业的特色优势与创 新发展[J].世界竹藤通讯,2020,18(06):6-13,29.
https://dx.doi.org/10.12168/sjzttx.2020.06.002.
[3] 刘翠翠,杨涛.机器视觉在智能制造中的应用与产业发 展[J].机床与液压,2021,49(11):172-178.
https://dx.doi.org/10.3969/j.issn.1001-3881.2021. 11.036.
[4] 吕虹毓.基于机器视觉的车道线及交通场景识别技术研 究[D].哈尔滨:哈尔滨理工大学,2021.
https://dx.doi.org/10.27063/d.cnki.ghlgu.2021.000044.
[5] 赵立明,龙大周,徐晓东,等.工业机器人加工轨迹双目 3D激光扫描成像修正方法[J/OL].智能系统学报, 2020(08):1-9[2021-08-04].
https://dx.doi.org/10.11992/tis.202008008.
[6] 王丹,杨江照.基于机器视觉的电子元件在线质检分类 系统设计[J].现代制造工程,2021(02):139-144,133.
https://dx.doi.org/10.16731/j.cnki.1671-3133.2021 02.021.
[7] 杨涛,李晓晓.机器视觉技术在现代农业生产中的研究 进展[J].中国农机化学报,2021,42(03):171-181.
https://dx.doi.org/10.13733/j.jcam.issn.2095-5553. 2021.03.024.
[8] 宋菲菲.基于产能匹配的竹集成材生产线的规划设计研 究[D].长沙:中南林业科技大学,2020.
https://dx.doi.org/10.27662/d.cnki.gznlc.2020.000154.
[9] 彭亮,吴振明,孙晓东,等.一种锯竹设备[P].湖南省: CN209737845U,2019-12-06.
[10] 沈冯峥.原竹自动截断、分选连续化设备设计[D].临 安:浙江农林大学,2020.
https://dx.doi.org/10.27756/d.cnki.gzjlx.2020.000030.
[11] 曾建飞,霍春燕.中国植物志[M]北京:科学出版 社,2004.
[12] 康牧.图像处理中几个关键算法的研究[D].西安:西安 电子科技大学,2009.
https://dx.doi.org/10.7666/d.y1618568.
[13] 戴天虹,邱筱斐.基于形态学的木材缺陷检测[J].机电 产品开发与创新,2011,24(05):79-81.
https://dx.doi.org/10.3969/j.issn.1002-6673.2011. 05.034.
[14] 吴桐.基于改进霍夫变换线段检测算法的实现和应用 [D].济南:山东大学,2018. 6 中国机械工程技术学报 Frontiers of Chinese Mechanical Engineering and Technology
Research on Fixed-Length Truncation System of Bamboo Based on Image Processing
SU Jianyi, WANG Zhenzhong*, CHEN Yongming
(Department of Mechanical and Electrical Engineering, Xiamen University, Xiamen 361005, China)
Abstract: In view of the low automation degree of bamboo fixed-length truncation equipment, this paper proposes a bamboo truncation control scheme based on software motion control, and uses image processing technology to integrate and design the bamboo joint identification system, which can effectively avoid opening and cutting bamboo joints during processing. Firstly, the smoothed image is obtained by grayscale processing, filtering and denoising; secondly, vertical line features are extracted by morphological operations such as opening operation and dilation; finally, by optimizing and screening the line segments obtained by the line edge detection, it is calculated and judged whether there is a bamboo joint in the pre-truncated area. The experimental results show that the accuracy rate of bamboo joint recognition of the system can reach 90%, and the recognition efficiency is high, which can meet the needs of fixed-length production of bamboo.
Keywords: Bamboo joint identification, machine vision, intelligence, integration
DOI: 10.48014/fcmet.20220422001
Citation: SU Jianyi,WANG Zhenzhong,CHEN Yongming.Research on fixed-length truncation system of bamboo based on image processing[J].Frontiers of Chinese Mechanical Engineering and Technology,2022, 1(1):1-7.
