南水北调中线干渠边坡藻类清除装置设计
王燎原1,*, 刘志强2, 李智广1
(1. 河南河务局, 郑州 450002
2. 开封黄河河务局, 开封 475002)
摘要: 南水北调是一个非常重要的工程, 它的建设对于解决中国北方缺水问题, 促进经济发展, 改善民生等方面都有着重要的意义, 但其也面临着一些环境问题, 例如边坡藻类时刻影响着南水北调的水质情况。本文主要围绕边坡藻类的清除, 设计了一款边坡除藻设备, 该设备在牵引车的驱动下带动清除机构进行藻类的清除工作, 根据藻类的结构特点和空化射流除藻的除藻效果, 采用空化射流的方法对南水北调边坡的藻类进行有效清除。本文首先进行机构履带底盘、机械臂和清除机构的设计, 然后采用软件Solidworks对机械臂进行建模, 并进行整体设备的装配。通过对装配图的动画仿真表明机构运转过程中无干涉现象, 运动轨迹和状态符合预期。通过ANSYS对机械臂进行静力分析和模态分析, 在静力分析中, 施加自身重力和前端拉力后, 结果表明机械臂的最大位移变形符合变形要求, 同时最大应力小于材料的屈服极限; 通过模态分析中六阶模态的振动频率估计出整机振动频率的振动范围, 从而完成对边坡除藻装置清除机构的设计。
关键词: 南水北调干渠, 履带底盘, 边坡除藻, 空化射流, ANSYS分析
DOI: 10.48014/fcmet.20231127002
引用格式: 王燎原, 刘志强, 李智广. 南水北调中线干渠边坡藻类清除装置设计[J]. 中国机械工程技术学报, 2024, 3(1): 23-31.
文章类型: 研究性论文
收稿日期: 2023-11-27
接收日期: 2024-01-10
出版日期: 2024-03-28
0 引言
近年来,经济快速发展的同时国家工业化水平不断提高,随之而来的是大量的工业废水被排放在江河湖泊中,导致水环境富营养化程度越来越高[1],藻类生物过量滋生,继而发生水华。南水北调工程建成后,沿线地区的水环境问题也随之发生了很大的变化,许多城市水域中蓝藻水华开始爆发。蓝藻水华的爆发不仅会降低水体质量,还会对南水北调工程造成一定的影响,及时除藻迫在眉睫。空化射流除藻这项新技术结合了物理、化学和生物方法去除水体中大量存在的有害藻类[2]。
对于空化射流技术,Thmoas提出了无量纲数σ,对空化概念进行了量化的描述,并且通过对无量纲数的定义能够判断空化是否发生[3]。随后是由Rayleigh、Plesset、Johnson& Hsieh相继的探索和研究,推导了单个空气泡的运动轨迹方程,为后来空化射流技术的发展奠定了基础。而在Chi Peng,Shouceng Tian,Gensheng Li等人的不断研究后,最后得出了利用线平均灰度计算空化云脱落频率能够拥有最佳的效果。在空泡水射流方面,黄细彬和夏维洪在我国首次实现了空泡水射流的混合气体切削实验,实验表明,加入适当的混合气体后,切削效果显著提高。刘峰,朱南文,王亚林三人在研究过程中,采用了一种新的方法,在新型气态喷嘴的作用下,可以有效地去除污水中的油脂,使污水在经过三个喷嘴的喷嘴之后,能够达标。卢义玉、冯欣艳、李晓红进行了汽蚀水射流破岩试验研究,结果表明,采用伸缩式喷头的汽蚀效应比采用伸缩式喷头的汽蚀效应好;同时,气穴喷嘴的射流停留在一个理想的冲刷距离内。胡坤、艾志久、付必伟等人研制出一种用于增强汽蚀作用的管状水口;采用数值方法对该模型进行了数值计算,得到了相应的气蚀变化规律。王萍辉在试验中,利用自激振动空化水口对管线进行清洁,可以显著地改善管线的清洁效果。
南水北调工程沿线分布着众多城市和人口密集区,是我国水污染治理中一个突出问题。对于南水北调工程而言,在保证水质安全的前提下,快速有效地消除蓝藻水华是一项重要任务。因此针对南水北调藻类污染问题,采用空化射流技术为取得良好的工程效果和实际效益,切实的保证南水北调中线工程的输水水质具有十分重要的意义。
1 边坡藻类清除装置设计
1.1 边坡除藻车的工作原理
结构设计的难点主要是牵引车履带底盘和藻类清除—收集一体化的结构设计,在设计的过程中履带底盘的坡面稳定性[4]是机构运行的关键,因此要充分考虑履带在坡面行走时的不同情况及其受力的大小,从而确定是否需要履带牵引车,以及牵引绳所需的拉力大小,通过履带牵引车自带的机械臂驱动清除机构进行作业,其次是根据产生空化射流的原理,绘制空化喷嘴的内部结构[5]。行进过程中清除机构主要由外部的高压水射流进入产生空化的旋转喷头对坡面藻类进行首次的清除,然后通过底侧带有毛刷的旋转扇叶将藻类转移至收集容腔,并且底部的毛刷会对坡面进行二次清除,为防止藻类的分散,清除机构底部四周有相应的毛刷对藻类进行拦截,而收集容腔底部设计密集的筛网,收集藻类的同时过滤多余的水分。整体的除藻设备是由履带牵引车、机械臂、清除机构、岸边拉链组成。工艺流程图如图1所示。
1.2 边坡除藻车的总体设计
(1)履带底盘的结构设计
边坡履带底盘行走机构是专门用于在陡峭岩石、悬崖或者沙漠等复杂地形中行驶的机构,它采用履带作为行走部件,具有稳定性和可靠性,同时还具有柔性、适应性和良好的越障性能。南水北调边坡坡面为水泥材质,为了防止铁质履带对坡面产生磨损情况,选择采用橡胶式的履带底盘。根据不同花纹类型适用情况选择小碎石斜肩式花纹。履带底盘行走机构一般由底盘、履带、驱动轮、导向轮、张紧轮、悬挂系统、行走调节机构等部分组成[6],可以实现前进、后退、转向、爬坡等动作[7],结构图如图2所示。
(2)机械臂的总体设计
履带机械臂的动力分为内燃动力和电动力两种,内燃动力机械臂使用燃油发动机作为能源,而电动机械臂使用电池或外接电源作为能源。内燃机械臂一般具有较高的功率和扭矩,能够适应高强度的作业场合,而电动机械臂通常更加环保、安静、易于维护[8]。机械臂主要采用底盘的马达进行传动,底部采用六角扇叶连接马达的同时更好的嵌入在机械臂的旋转底盘上,控制臂身旋转的同时能够增大机械臂的工作效率,此外机械臂的上升和下降主要由底座上的左右舵机进行驱动。
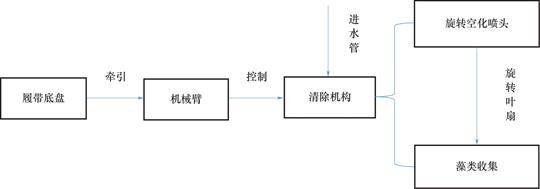
图1 工艺流程图
Fig.1 Process flow diagram
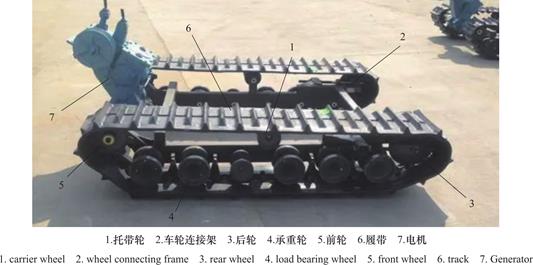
图2 履带底盘行走机构
Fig.2 Traveling mechanism of crawler chassis
机械臂的控制一般通过遥控器或者自动化控制系统实现[9]。遥控器主要通过红外、无线、蓝牙等方式与机械臂通讯,具有灵活性、易掌握等特点,但在远距离或者深度作业时有受限的可能。自动化控制系统通过各种传感器和程序实现对机械臂的自动化控制,更为精确、高效、安全,但需要耗费较多的成本和时间进行设计和维护。关键在于掌握对应的控制技术与操作规程,以保证机械臂的安全、高效运行、操作易用性。
(3)清除机构的结构设计
为了清除南水北调中线干渠的边坡藻类,采用空化射流的除藻工艺。空化射流的清洗实验原理如图3所示,主要由水箱、流量计、水泵、调压阀、压力表和喷嘴组成[10],其原理是通过水泵将水箱中的水转变成高压的水射流,经过特定的高压胶管进行输送,高压胶管内径为1.5cm,厚度为0.5cm,最后利用喷嘴产生空化效果,从而完成清除机构对边坡藻类的首次清除,同时在实验的过程中需要不断地调节调压阀的数值确保在清除边坡藻类的前提下确定最小的压力和流量。
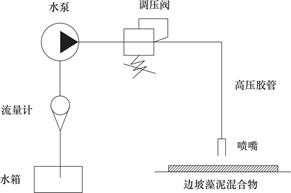
图3 实验原理图
Fig.3 Experimental schematic diagram
旋转式空化喷嘴的排列方式采用直线式,根据相关文献的数据得到空化射流的参数主要围绕高压水泵的压力、高压水泵流量、空化喷嘴的直径和空化喷嘴的数量确定,具体数值如表1所示。
表1 空化喷嘴参数
Table 1 Parameters of cavitation nozzle
|
参数
|
数值
|
|
高压水泵压力/bar
|
120~150
|
|
高压水泵流量/(L/min)
|
40
|
|
空化喷嘴直/cm
|
1.5
|
|
空化喷嘴的数量
|
3
|
根据相关文献数据得喷嘴的入口压力达到120MPa时,能够完成边坡藻类的清除任务,而此时的流量计所显示的流量是20L/min。为了达到产生空化效果的前提下清除边坡藻类,设计的相适应的收缩扩张形喷嘴示意如图4所示。
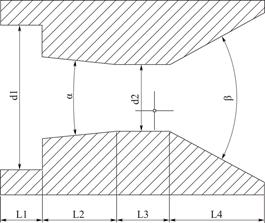
图4 空化喷嘴原理图
Fig.4 Schematic diagram of cavitation nozzle
其中收缩角α和扩散角β应选取公认最好的13.5°和60°。入口段直径15mm,入口段的长度L1=10mm、收缩段的长度L2=12mm、圆柱段的长度L3=10mm、扩散段的长度L4=13mm。
旋转喷头数量设置为三个,其主要由四部分组成,分别是喷嘴、喷杆、弯头和旋转接头。在结构合理的前提下加大清洗的力度,将喷杆的周围设置呈120°的三个喷嘴,每一个喷嘴和喷杆在配对安装时,喷嘴和喷杆所在平面呈45°倾斜向下且彼此方向一致。此时能够保证空化射流对边坡藻类有较大的清除力度,同时水射流所产生的回转力矩能够让旋转喷头自动旋转,不但减小动力的输出还加大了清除的效率。
在排列旋转喷头的同时,需要保证排列的喷头能够覆盖清除机构内的范围,保证不会出现无法清理的死角,需要保证清洗的总范围大于等于清除机构的箱体宽度。
旋转扇叶机构主要位于旋转喷头的后方,由电动马达、配对齿轮和旋转扇叶组成,主要作用是将清除以后的藻类转移至后方的容腔中,此外通过扇叶底部的毛刷将接触表面进行二次清理。
机构通过电动马达驱动,从动齿轮与马达轴采用单键连接,齿数为20,从动齿轮与扇叶轴采用四键连接,齿数为30,保持传动的同时,增大机构的运动强度同时防止阻力过大对键的损坏,设置配对齿轮的模数为1,压力角为标准20°,轮毂直径为15cm。此外底盘设计了特殊的梁体结构,在承载定位扇叶的同时,采用左侧为45°的斜面,右侧为高度为10cm的垂直面,其中斜面是为了将清除下来的藻类更加容易地转移至后侧容腔,而垂直面是为了刮下毛刷上残留的藻类同时将藻类阻隔在容腔中。此外为了收集藻类的同时能够将藻水分离,在清除机构的底部安装筛网。
1.3 机械臂的模型建立
机械臂底盘主要通过底部与叶盘连接件相配合进行传动,叶盘连接件中嵌入的旋转叶盘连接传动马达,其结构主要由六个叶瓣,传递动力的同时增加传动能力。通过草图绘制确定扇叶的最大直径为35cm,每个叶瓣轴心相隔60°,绘制叶瓣轮廓并拉伸后,在每个叶面上绘制三个直径为3cm的连接孔,模型如图5所示。而机械臂底盘厚度为4cm,绘制与叶盘连接件想配合的扇形孔的同时,设有三排平行的插孔,用于安装机械臂的主副支撑板,具体模型如图6所示。
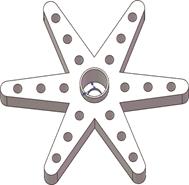
图5 旋转叶盘建模
Fig.5 Modeling of rotating leaf disk
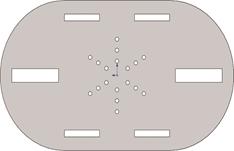
图6 机械底盘建模
Fig.6 Mechanical chassis modeling
机械臂支撑板固定在支撑板连接件上,两块副支撑板和主支撑板主要通过草图拉伸命令进行建模,副支撑板上绘制长20cm,宽15cm的矩形通孔,和平行宽度上下两排连接孔用于和舵机相连,主副支撑板模型如图7所示。两个副支撑板安装舵机后通过同轴配合各连接一个小型的旋转叶盘,通过连接盘上的环形通孔进行同轴配合,用于连接主机械臂控制机械臂的起幅,中间轴连接左右舵机的同时固定主支撑板,总体连接模型图如图8所示。

图7 主副支撑板模型
Fig.7 Model of main and secondary support plates
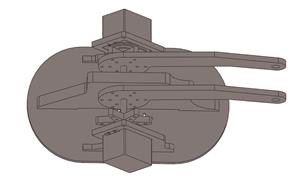
图8 主副支撑板总体连接的三维模型
Fig.8 3D model of the overall connection of the main and secondary support plates
新建SolidWorks装配体,插入装配体履带底盘,机械臂,清除机构以及其他零件进行装配,通过标准配合中的重合、平行、同轴心、相切、距离,以及机械配合的齿轮小齿条配合等各种配合命令将每一个零件布置在固定的合适位置,完成装配后如图9所示。其中前后驱动轮,机械臂底盘,机械臂的起幅以及旋转扇叶均可运动,可以通过solidworks软件对本次建立的模型进行运动仿真。由于机械臂所受载荷对机构总体有较大的影响,下面单独对机械臂进行有限元仿真及分析。
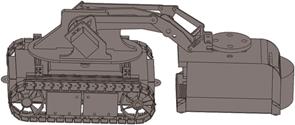
图9 整体装配图
Fig.9 Overall assembly diagram
1.4 机械臂的有限元仿真及分析
三维模型主要通过SolidWorks进行建模,然后导入Ansys中。加载好模型后,主要材料为Q235,该类型钢板自重轻强度高,相关参数如表2所示。完成材料的定义之后,在model中,设定材料,然后点击mash进行网格划分,经过网格大小的更改Solve后最终得到模型如图10所示,其中单元数量24188节点数量79197。
表2 相关参数
Table 2 Relevant parameters
|
名称
单位
|
屈服强度
σs/MPa
|
抗拉强度
σb/MPa
|
弹性模量
E/Pa
|
泊松比
μ
|
密度
ρ/(kg/m3)
|
|
数值
|
235
|
375
|
2.1× 1011
|
0.3
|
7850
|
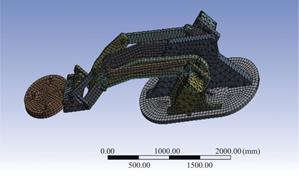
图10 网格划分
Fig.10 Grid division
(1)机械臂静力学分析
在静止工况时,约束的条件不会发生变化。施加载荷时对机械臂底盘和三组插板进行约束,一共施加7个约束点,约束设置如图11所示。施加的载荷主要分为车架自身重力和清除机构的重力两方面。通过施加机构的自身重力和连接盘上的竖直拉力2000N,得到了机构的位移变形如图12,应力云图如图13。
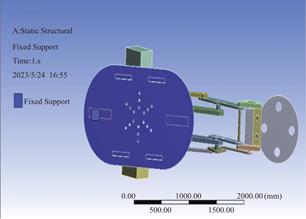
图11 施加约束
Fig.11 Applying constraints
由分析图可以看出最大位移量出现在连接盘的前端,大小为1.9804mm。而最大应力在连接盘的连接架上,大小为73.703MPa,小于Q345的最大屈服极限345MPa,即机构的整体应力在材料的最大屈服极限内。
(2)机械臂的模态分析
在ANSYS模态分析模块中导入机械臂模型,设置材料属性后进行网格的划分并添加约束。通过运算求解得出机械臂的前6阶振动特性,前六阶共振频率如表3所示,模型具体振型如图14所示。分析得出整机的振动频率不能接近机械臂的固有频率,以免发生共振,从而产生最大变形。
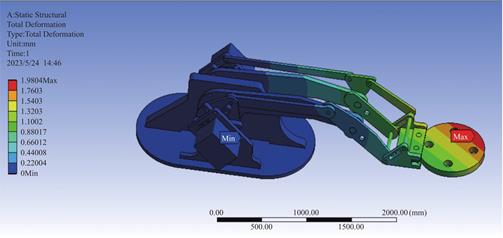
图12 位移云图
Fig.12 Displacement cloud
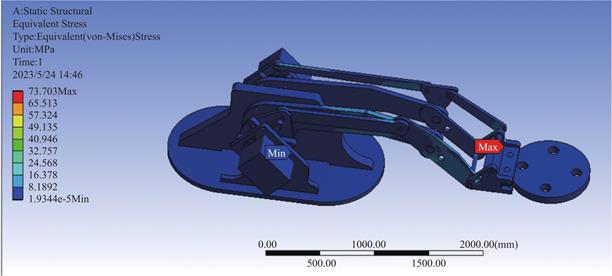
图13 应力云图
Fig.13 Stress cloud
表3 机械臂前六阶固有频率和振型
Table 3 The first six orders of intrinsic frequency and vibration pattern of the robotic arm
|
阶
|
固有频率/Hz
|
振型
|
|
一阶
|
10.378Hz
|
一阶振动频率下机械臂模型在连接盘前半部分处出现较大变形,最大变形量为1.77mm
|
|
二阶
|
17.273Hz
|
二阶振动频率下机械臂模型在连接盘左端出现较大变形,最大变形量为2.4151mm
|
|
三阶
|
33.199Hz
|
三阶振动频率下的机械臂模型最大变形在连接盘右端出现,变形量为3.035mm
|
|
四阶
|
41.834Hz
|
四阶机架振型中在机械臂模型左端杆臂出现较大变形,最大变形量为3.2331mm
|
|
五阶
|
56.247Hz
|
五阶机械臂模型在右端杆臂出现最大变形,变形量为3.8608mm
|
|
六阶
|
61.502Hz
|
六阶机械臂振型主要变形出现在模型左右杆臂端,变形量为2.6322mm
|
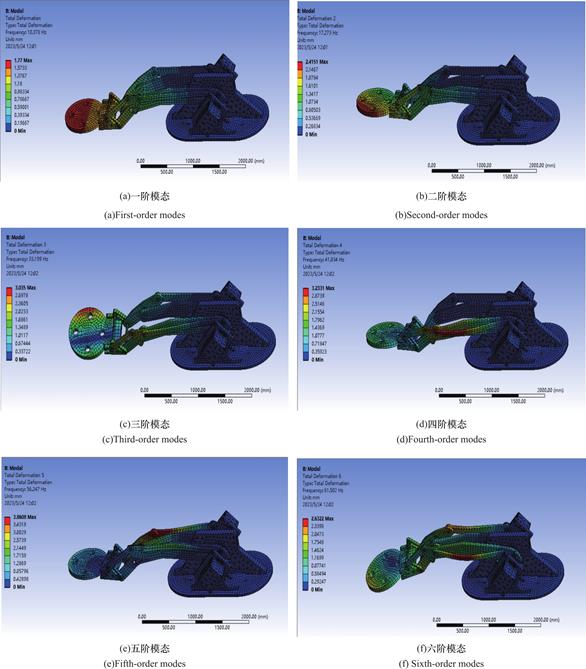
图14 模型具体振型
Fig.14 Model-specific vibration patterns
2 结论
针对空化射流除藻的独特优势,以及对环境无污染的影响,最终选择设计的核心原理是通过空化射流所产生的空化剥蚀效果对边坡藻类进行清除,并在原有的基础上加装了过滤板和底部的毛刷进行两次藻水的分离以达到更好的清除效果。首先是对于履带底盘设计,主要针对履带材质的选择以及根据边坡的水泥材质选择小碎石斜肩式履带花纹,确保防止履带对边坡的损坏的前提下增加履带底盘的稳定性。其次是对机械臂的设计,主要驱动方式是通过马达传动并通过舵机控制机械臂的上升和下降。并通过ANSYS对机械臂进行静力学分析和模态分析,得出机构的最大位移出现在连接盘的前端,大小为1.9804mm,最大应力在连接盘的连接架上,大小为73.703MPa,小于材料的最大屈服极限,得出机械臂的设计满足要求。最后对清除机构的设计,为了达到清除的效果,首先是采用了三喷口式的空化喷头,针对产生空化效果的原理设计空化喷头内部的原理尺寸,分析了其有效的清除面积。紧接对清除后的藻类如何进行有效且合理的收集展开了一系列方案的思考,选择电机驱动的旋转扇叶对藻类进行收集。
利益冲突: 作者声明无利益冲突。
[③] *通讯作者 Corresponding author:王燎原,1209843625@qq.com
收稿日期:2023-11-27; 录用日期:2024-01-10; 发表日期:2024-03-28
参考文献(References)
[1] 宋珺颐. 南水北调干渠边坡除藻小车设计与研究[D]. 郑 州: 华北水利水电大学, 2022.
https://doi.org/10.27144/d.cnki.ghbsc.2022.000611
[2] 王金龙, 张俊亮, 张夏琦, 等. 修井作业机械臂受力分析及结构优化[J]. 潍坊学院学报, 2022, 22(02): 29-32.
https://doi.org/10.3969/j.issn.1671-4288.2022.02.008
[3] 曲科宇. 二氧化氯对蒙山水厂中藻类及生成物控制效果的研究[D]. 济南: 山东建筑大学, 2020.
https://doi.org/10.27273/d.cnki.gsajc.2020.000671
[4] 周厚强. 大功率往复式压缩机整机振动分析[D]. 青岛: 中国石油大学(华东), 2017.
[5] 曲毅. 光全散射法颗粒粒径反演算法研究[D]. 唐山: 华北理工大学, 2018.
[6] 韩雷刚. 强冲击下BD1轧机机架辊螺栓失效的力学分析及优化[D]. 包头: 内蒙古科技大学, 2016.
https://doi.org/10.7666/d.D846821
[7] Yilbas S B, Akthar S. Laser welding of Haynes 188 alloy sheet: thermal stress analysis[J]. The International Journal of Advanced Manufacturing Technology, 2011, 56(1-4): 115-124.
[8] 孙霖. 携带机械臂的履带救援机器人设计与仿真实验研究[D]. 哈尔滨: 哈尔滨工业大学, 2020.
https://doi.org/10.27061/d.cnki.ghgdu.2020.003730
[9] 卜雷. 生产线机械制造设备机械臂自动化控制方法[J]. 制造业自动化, 2022, 44(01): 198-201.
https://doi.org/10.3969/j.issn.1009-0134.2022.01.045
[10] 曹桂英, 陈松, 陈欣, 等. 空化射流清洗式边坡除藻多功能专用车试验研究[C]//中国水利学会. 中国水利学会2019学术年会论文集第五分册. 南水北调中线干线工程建设管理局河南分局; 黄河水利委员会黄河机械厂; 华北水利水电大学机械学院, 2019: 4.
https://doi.org/10.26914/c.cnkihy.2019.097437
Design of Algae Removal Device for Slopes of South-to-North Water Diversion Mainline Canal
WANG Liaoyuan1,*, LIU Zhiqiang2, LI Zhiguang1
(1. Henan Administrative Branch of Yellow River Conservancy Commission, Zhengzhou 450002, China
2. Kaifeng Yellow River Administrative Bureau, Kaifeng 475002, China)
Abstract: South-to-North Water Diversion is a very important project, and its construction is important for solving the problem of water shortage in northern China, promoting economic development, and improving people's livelihood. However, it also faces some environmental problems, such as algae on the side slopes which always affect the water quality of the South-to-North Water Diversion. This paper mainly focuses on the removal of algae on the slope, designs a slope algae removal equipment, the equipment in the tractor drive to drive the removal mechanism for the removal of algae, according to the structural characteristics of algae and cavitation jet de-algae algae removal effect, the use of cavitation jet method of the South-to-North Water Diversion of algae on the slope of the slope for effective removal. In this paper, we first carry out the design of institutional track chassis, mechanical arm and removal mechanism, and then use the software Solidworks to model the mechanical arm and carry out the assembly of the overall equipment. The animation simulation of the assembly diagram shows that there is no interference during the operation of the mechanism, and the motion trajectory and state are in line with expectations. Through ANSYS static analysis and modal analysis of the mechanical arm, in the static analysis, after applying its own gravity and frontend tension, the results show that the maximum displacement and deformation of the mechanical arm are in line with the deformation requirements, while the maximum stress is less than the yield limit of the material; through the modal analysis of the vibration frequency of the sixth-order modes estimate the vibration frequency of the vibration frequency of the whole machine vibration range, so as to complete the design of the slope algaecide removal device removing mechanism.
Keywords: South-to-north water diversion main canal, crawler chassis, slope algae removal, cavitation jet, ANSYS analysis
DOI: 10.48014/fcmet.20231127002
Citation: WANG Liaoyuan, LIU Zhiqiang, LI Zhiguang. Design of algae removal device for slopes of southto- north water diversion mainline canal[J]. Frontiers of Chinese Mechanical Engineering and Technology, 2024, 3(1): 23-31.
